







Гидравлическими усилителями (ГУ) мощности называют устройства, служащие для преобразования сигнала управления в виде перемещения или в виде усилия (момента) в перемещении ведомого звена двигателя посредством жидкости, которая подводится под давлением, с целью управления распределителями, клапанами, регулируемыми дросселями, регулируемыми насосами, регулируемыми двигателями и другими устройствами управления.
Увеличение передаваемой ГУ мощности осуществляется за счет энергии гидравлического источника питания (насосной установки, аккумулятора и др.), подводимой посредством рабочей жидкости под давлением.
ГУ характеризуется числом последовательно соединенных РДР, через которые проходит сигнал управления к гидродвигателю. По этому признаку их подразделяют на одно-, двух- и многокаскадные. Однокаскадные ГУ наиболее распространены. Они иногда различаются и по типу распределителя в первых каскадах усиления.
ГУ различают также по способу обеспечения пропорциональности между перемещением ведомого звена двигателя и сигналом управления.
ГУ включает один или несколько последовательно соединенных РДР, двигатель и устройство, обеспечивающее функциональную зависимость между перемещением ведомого звена двигателя и сигналом управления.
Разновидностью ГУ являются электрогидравлические усилители (ЭГУ) мощности и ЭГУ преобразователи. Они широко используются в электрогидравлических системах дистанционного управления. Их сокращенно называют электрогидроусилителями.
ЭГУ мощности называют ГУ, оснащенные устройствами для преобразования входного электрического сигнала в перемещение ведомого звена двигателя. В ЭГУ-преобразователях выходным сигналом является расход жидкости.
Усилители по способу обеспечения пропорциональности между перемещением ведомого звена двигателя и сигналом управления ГУ подразделяют на ГУ без обратной связи (по положению), с кинематической, механической и силовой обратной связью по положению (ведомого звена двигателя).
Усилители без обратной связи. Схема такого ГУ показана на рис.6.5. Он состоит из РДР 1, цилиндра 3 и возвратных пружин 2. Обязательным является наличие распределителя, служащего для обеспечения пропорциональной связи между перемещением его управляющего элемента и перепадом давления в междроссельных камерах. В качестве последнего применяют двух- или четырехщелевой РДР сопло–заслонка, распределитель со струйной трубкой или его разновидности, а также четырехщелевой золотниковый РДР с отрицательным перекрытием (с протоком), как это показано на рис.6.5. При перемещении управляющего элемента РДР 1 из нейтрального положения изменяется перепад давления в рабочих полостях цилиндра 3. Его шток передвигается из нейтрального положения до тех пор, пока сила сжатия пружин 2 не уравновесит силу, вызванную перепадом давления.
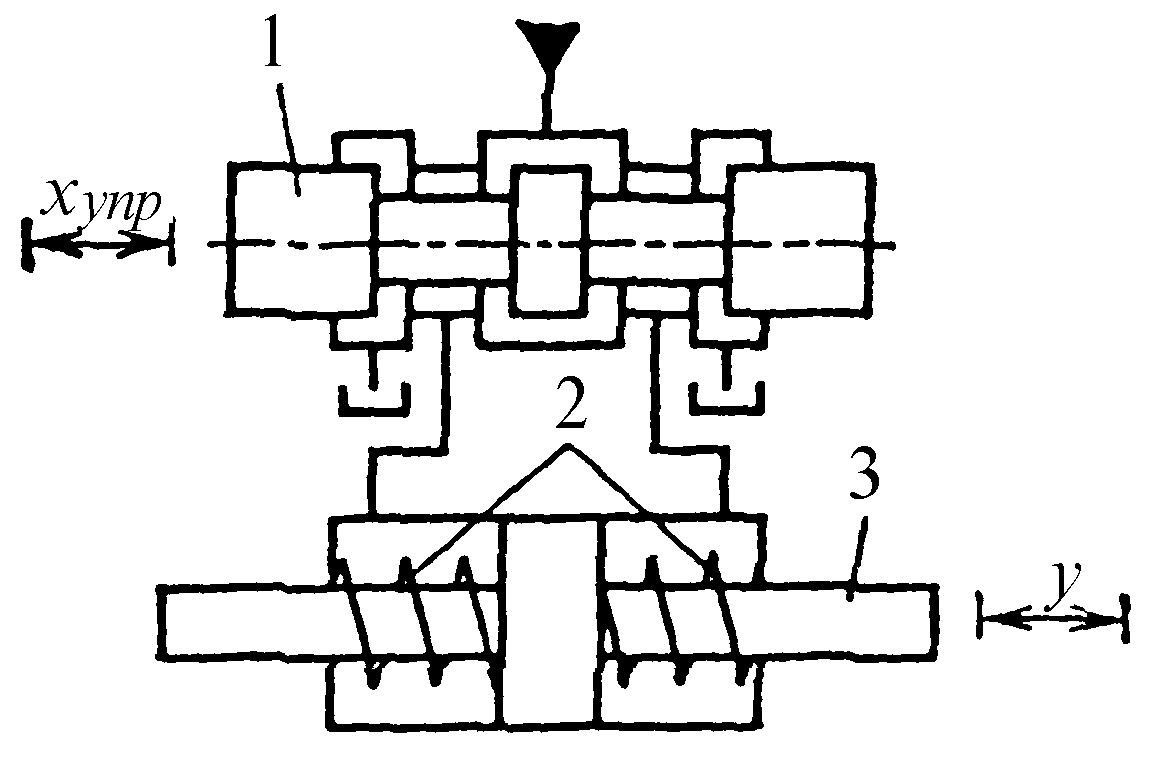
Рис.6.5. Схема усилителя без обратной связи
Постоянная времени усилителя Тгу определяется суммой постоянных времени: постоянной времени ГУ без учета сжимаемости жидкости Тг и постоянной времени Тс, обусловленной сжимаемостью рабочей жидкости. Последняя зависит от объема vr (половина суммарного объема рабочих полостей двигателя и междроссельных камер вместе с исполнительными линиями) и модуля объемной упругости рабочей жидкости. В ГУ повышенной мощности Тг > Тс.
К недостаткам ГУ этого типа следует отнести постоянный непроизводительный расход жидкости, увеличенную постоянную времени из-за сжимаемости жидкости и повышенную чувствительность к внешней нагрузке, в том числе к контактному трению. Однако простота их конструкции и настройки в сочетании с двухщелевым РДР сопло—заслонка обеспечивали их широкое использование в электрогидравлических следящих приводах.
Усилители с кинематической обратной связью. ГУ (рис.6.6а) состоит из РДР 1, рычага 2 и цилиндра 3. В качестве РДР здесь можно использовать распределитель любого типа, в том числе и золотникового с нулевым или небольшим положительным перекрытием. Последний имеет в отличие от проточных малые утечки.
Если верхний конец рычага 2 сместить относительно нейтрального положения, то переместится и управляющий элемент дросселирующего распределителя 1, что приведет в движение шток цилиндра 3. Последний, увлекая за собой нижний конец рычага 2, возвращает управляющий элемент распределителя 1 в нейтральное положение, что приводит к останову штока в новом положении, зависящем от величины перемещения верхнего конца рычага.
На рис.6.6б показана схема другого ГУ с кинематической обратной связью. РДР состоит из управляющего элемента 1 (золотника) и основания распределителя 2 (гильзы), рычага обратной связи 4 и цилиндра 3.

Рис.6.6. Схемы усилителей с кинематической обратной связью по положению
Сигнал управления (перемещение золотника относительно гильзы) приводит в движение шток цилиндра, перемещающий через рычаг обратной связи гильзу, уменьшая тем самым рассогласование между гильзой и золотником.
Частным случаем данного на рис.6.6б ГУ является ГУ с единичной обратной связью (kух = 1, l1 = l2). В усилителях этого типа обычно рычаг обратной связи отсутствует. Вместо этого основание РДР крепится или на штоке при неподвижном цилиндре, или на цилиндре при неподвижном штоке.
Эти усилители имеют небольшие утечки при всех установившихся значениях сигнала управления при использовании в качестве распределителя золотникового РДР с незначительной величиной положительных осевых перекрытий.
Усилители с механической обратной связью по положению (рис.6.7) ГУ состоит из двух двухщелевых РДР проточного типа: 1 - в цепи управления, 3 - в цепи обратной связи жестко через рычаг 4 обратной связи связан с цилиндром 2. Рабочие окна обоих двухщелевых РДР соответственно соединены линиями и образуют две междроссельные камеры, с которыми соединены рабочие полости цилиндра.
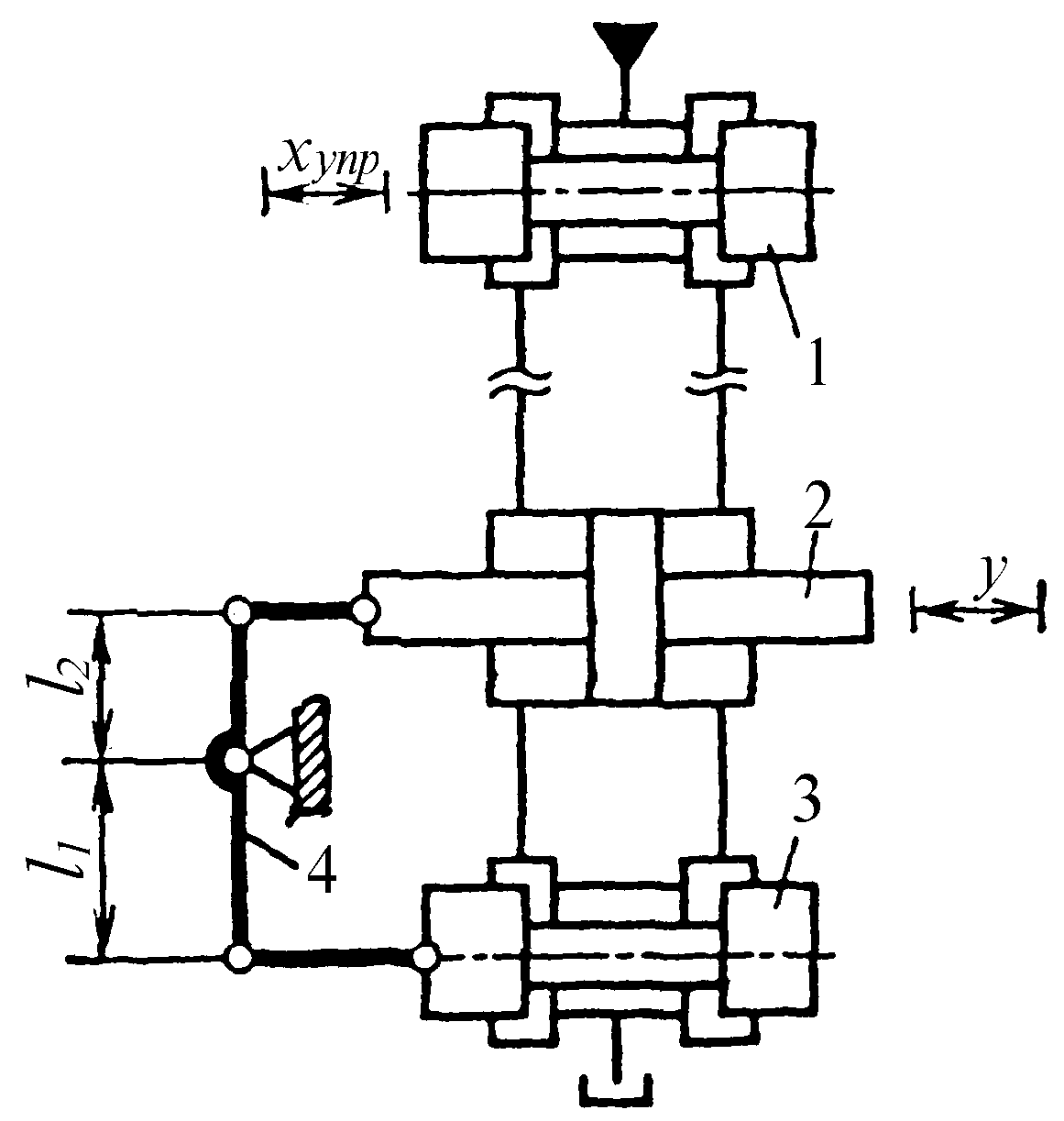
Рис.6.7. Схема усилителя с механической обратной связью по положению
Когда все подвижные элементы ГУ расположены в нейтральном положении, то давления в рабочих полостях цилиндра равны. При смещении управляющего элемента РДР 1 из нейтрали появляется разность давлений, и шток цилиндра 2 начинает перемещаться. При этом через рычаг 4 обратной связи его движение передается управляющему элементу РДР 3 обратной связи. Гидравлическое сопротивление рабочих окон последнего изменяется. Уменьшается при этом и перепад давления в полостях цилиндра. Он станет равным нулю, как только гидравлические сопротивления соответствующих рабочих окон РДР 1 и 3 сравняются, и шток цилиндра 2 остановится.
Достоинством ГУ с механической обратной связью по положению, скомпонованных по схеме рис.6.7, является возможность расположения задающего распределителя на значительном расстоянии от двигателя. В этом случае не нужно прокладывать механические связи в виде рычагов и тросов. Это облегчает компоновку оборудования. Однако непроизводительный большой расход и чувствительность к нагрузке, в том числе и к силам контактного трения, ограничивают применение таких ГУ. Последние применяют в сочетании с распределителями проточного типа, например, сопло-заслонка в электрогидравлических усилителях, а также в ряде систем ручного управления в качестве предварительного каскада усиления.
В усилителях с силовой обратной связью по положению входным сигналом является усилие, воспринимаемое управляющим элементом дросселирующего распределителя. ГУ с силовой обратной связью по положению (рис.6.8) включает РДР 1, цилиндр 2, рычаг 3 обратной связи и пружину 4 обратной связи. Рычаг и пружина обратной связи конструктивно могут быть объединены и выполнены в виде плоской, консольно закрепленной на управляющем элементе распределителя пружины.
При воздействии на золотник РДР 1 управляющего сигнала Рупр. золотник РДР сместится из нейтрального положения благодаря жесткости пружины обратной связи сос на величину x. Это вызывает перемещение штока цилиндра. Последний через рычаг обратной связи и пружину обратной связи создает на управляющем элементе усилие обратной связи Рос, которое обратно по знаку управляющему усилию. При равенстве этих усилий шток цилиндра остановится в положении у, пропорциональном величине управляющего усилия Pупр. Основным достоинством таких ГУ является то, что в качестве управляющего им сигнала можно использовать управляющее усилие без дополнительных преобразований. Такой вид сигнала обеспечивают все электромеханические преобразователи. Поэтому эти ГУ широко используются в конструкциях электрогидравлических усилителей с РДР типа сопло-заслонка или с РДР в виде струйной трубки.
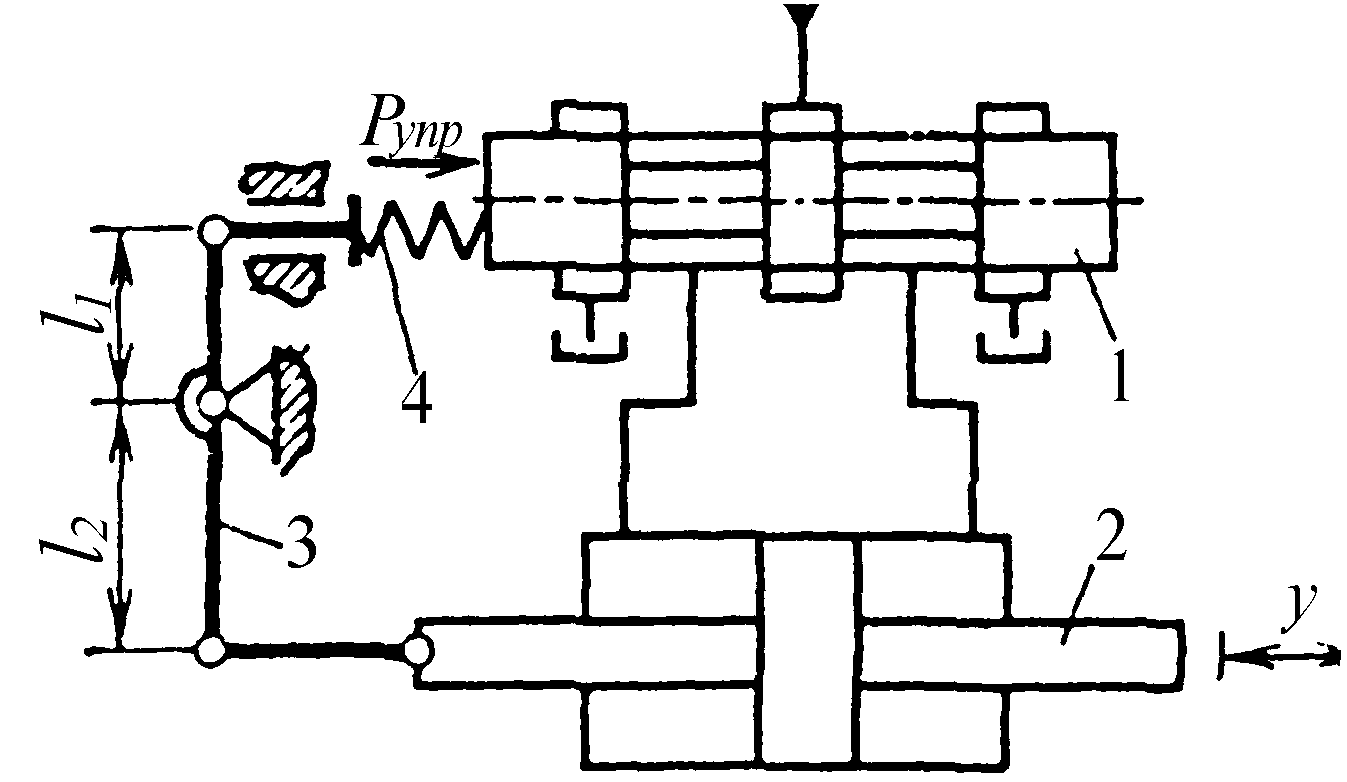
Рис.6.8. Усилитель с силовой обратной связью по положению
Электрогидравлические усилители мощности без обратной связи по положению. Простыми ЭГУ мощности без обратной связи по положению являются однокаскадные усилители, состоящие из электромеханического преобразователя и дроссселирующего распределителя. Такие ЭГУ служат для преобразования электрического сигнала управления в усиленный по мощности поток рабочей жидкости, подводимой под давлением. При подсоединении к исполнительному двигателю такой усилитель обеспечивает пропорциональное регулирование его скорости.
Расход через исполнительные линии РДР распределителя определяется не только смещением из нейтрального положения его управляющего элемента, а также давлением нагрузки и сжимаемостью рабочей жидкости, которые определяются параметрами рабочей жидкости и нагрузки.
Одним из наиболее простых двухкаскадных ЭГУ без обратной связи по положению является ЭГУ, показанный на рис.6.9. На корпусе 14 смонтирован электромеханический преобразователь 1. В корпусе установлен РДР сопло-заслонка, являющийся первым каскадом ГУ и состоящий из заслонки 2, сопел 3 и 13 и двух постоянных дросселей 4 и 12, а также золотниковый РДР 9 с центрирующими пружинами 8 и 10, который служит вторым каскадом гидравлического усиления. Заслонка 2 жестко соединена с входным валом преобразователя 1. Регулировочный винт 7 позволяет выставлять в нуль РДР 9. Технологические заглушки 5 и 11 служат для подсоединения к междроссельным камерам РДР сопло-заслонка манометров для его настройки. Устройство 6 предназначено для понижения давления питания, подводимого к РДР сопло-заслонка для уменьшения утечек через сопла (непроизводительного расхода) и обеспечения при этом линейности перепадной характеристики.
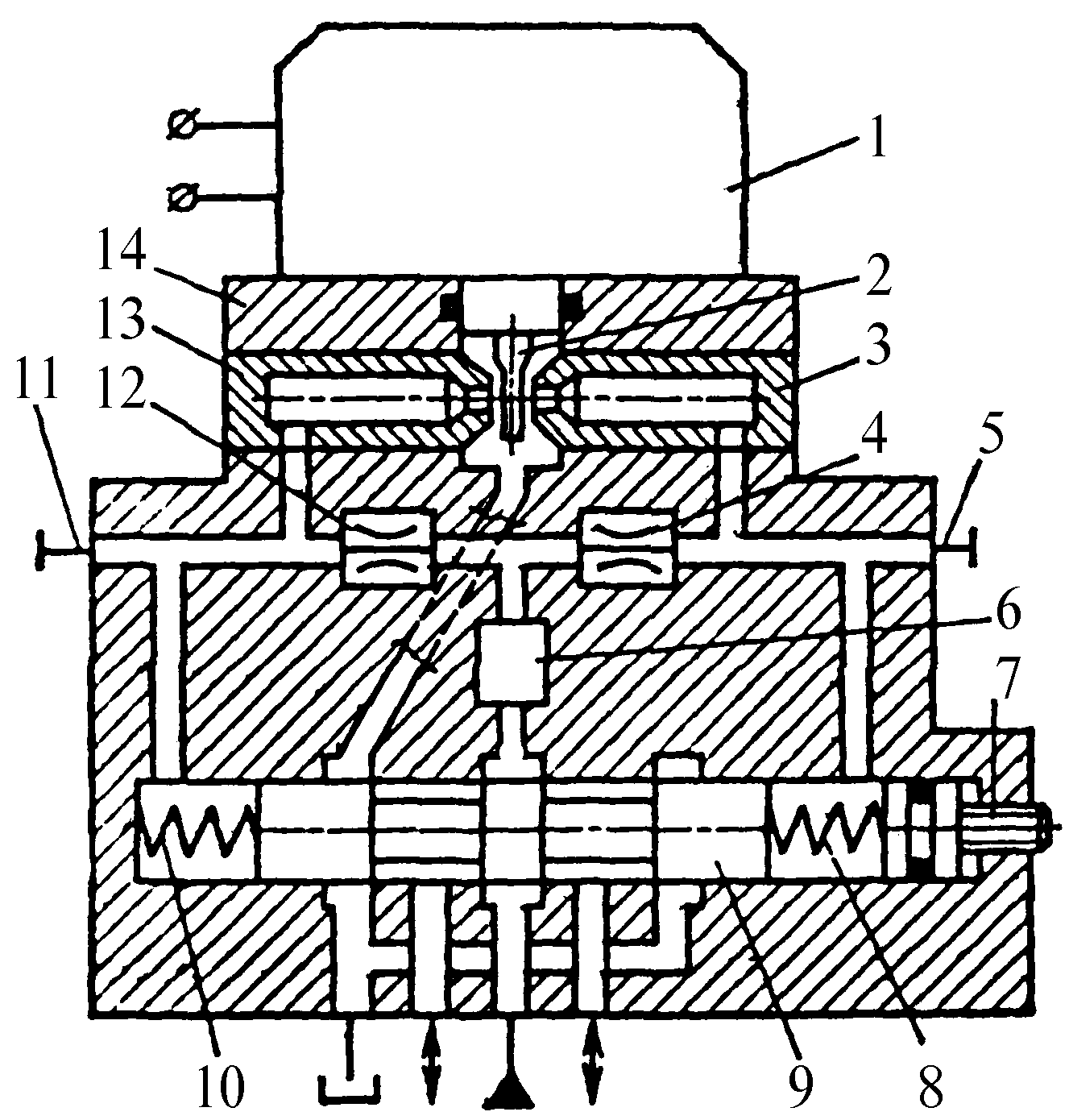
Рис.6.9. Схема двухкаскадного электрогидравличеекого усилителя мощности без обратной связи
Электрогидравлические усилители мощности с обратной связью по положению. Введение обратной связи по положению понижает чувствительность ЭГУ к нагрузкам, действующим на выходной элемент, и увеличивает быстродействие за счет исключения постоянной времени, обусловленной сжимаемостью жидкости. ЭГУ с обратной связью по положению по виду применяемого ГУ делят на ГУ с кинематической, механической и силовой обратной связью по положению.
Электрогидроусилители с механической обратной связью по положению. Схема ЭГУ (рис.6.10) включает: электромеханический преобразователь 1; распределитель сопло-заслонка, состоящий из четырех сопл 3, 6, 9 и 11 и двух заслонок 2 и 4; РДР 8; рычаг 7 обратной связи. Все элементы ЭГУ смонтированы в корпусе 12. Конструкция также содержит технологические заглушки 5 и 10, служащие для установки манометров во время настройки ЭГУ.
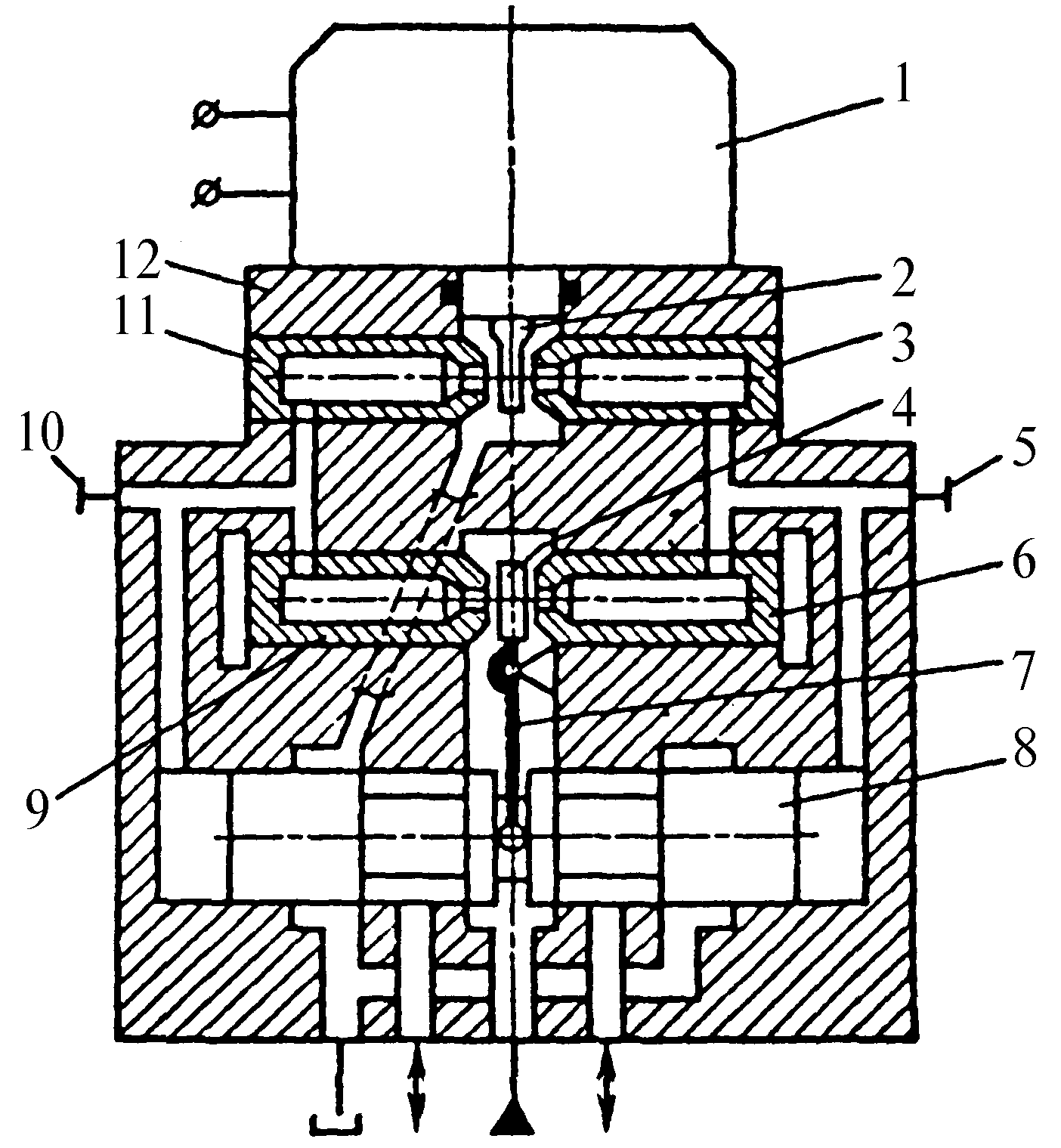
Рис.6.10. Схема двухкаскадного электрогидравлического усилителя мощности с механической обратной связью по положению
Когда ток управления в обмотках преобразователя 1 отсутствует, все подвижные элементы ЭГУ находятся в нейтральном положении. При этом гидравлические сопротивления соответствующих пар регулируемых дросселей сопло-заслонка равны. Заслонка 2 при подаче тока управления под действием электромагнитных сил смещается из нейтрали, изменяются соответственно гидравлические сопротивления сопел 3 и 11, а золотник РДР 8 начинает перемещаться. При этом он тянет за собой нижний конец рычага 7 обратной связи, заслонка 4 перемещается из нейтрали на величину, пропорциональную смещению золотника РДР 8, изменяя соответственно гидравлическое сопротивление сопел 6 и 9. При равенстве гидравлических сопротивлений сопел 3 и 6, а также 11 и 9, золотник РДР 8 остановится. Таким образом, положение золотника определяется положением заслонки 2, следовательно, величиной тока в обмотках управления электромеханического преобразователя. ЭГУ имеет недостаток, который заключается в том, что при подаче малых величин токов управления заслонка смещается на малые величины. Это вызывает появление малых перестановочных усилий на золотнике, которые обусловлены невысокой крутизной перепадной характеристики распределителя сопло-заслонка. Вследствие этого небольшое увеличение контактного трения в золотнике приводит к возникновению значительной зоны нечувствительности в статической характеристике ЭГУ.
Электрогидравлические усилители с силовой обратной связью по положению. Недостатки ЭГУ с механической обратной связью по положению и двухкаскадных ЭГУ без обратной связи по положению отсутствуют у ЭГУ с силовой обратной связью по положению (рис.6.11). На корпусе 12 расположены элементы: электромеханический преобразователь 1; распределитель сопло–заслонка, состоящий из сопел 3 и 11, заслонки 2 и постоянных дросселей 6 и 9; золотниковый РДР, состоящий из золотника 7 и гильзы 8. На торце заслонки 2 установлена плоская консольная пружина 4. На свободном конце ее смонтирована сфера. Последняя зазором 2–5 мкм размещена в кольцевой проточке золотника 7. Технологические заглушки 5 и 10 предназначены для подключения манометров во время настройки ЭГУ. При подаче тока в обмотки управления электромеханического преобразователя 1 заслонка2, преодолевая жесткость пружины 4обратной связи, перемещается из нейтрального положения. Это приводит в движение золотник7. Последний тянет нижний конец пружины4обратной связи и создает момент на валу преобразователя, пропорциональный величине его смещения изнейтрали. Момент складывается с моментом сил, обусловленным током управления. При уравнивании моментов заслонка 2 возвратится в нейтральное положение, и золотник 7 остановится.
Таким образом, положение ЭГУ определяется только моментом электромагнитных сил, зависящих от силы тока в обмотках управления преобразователя.
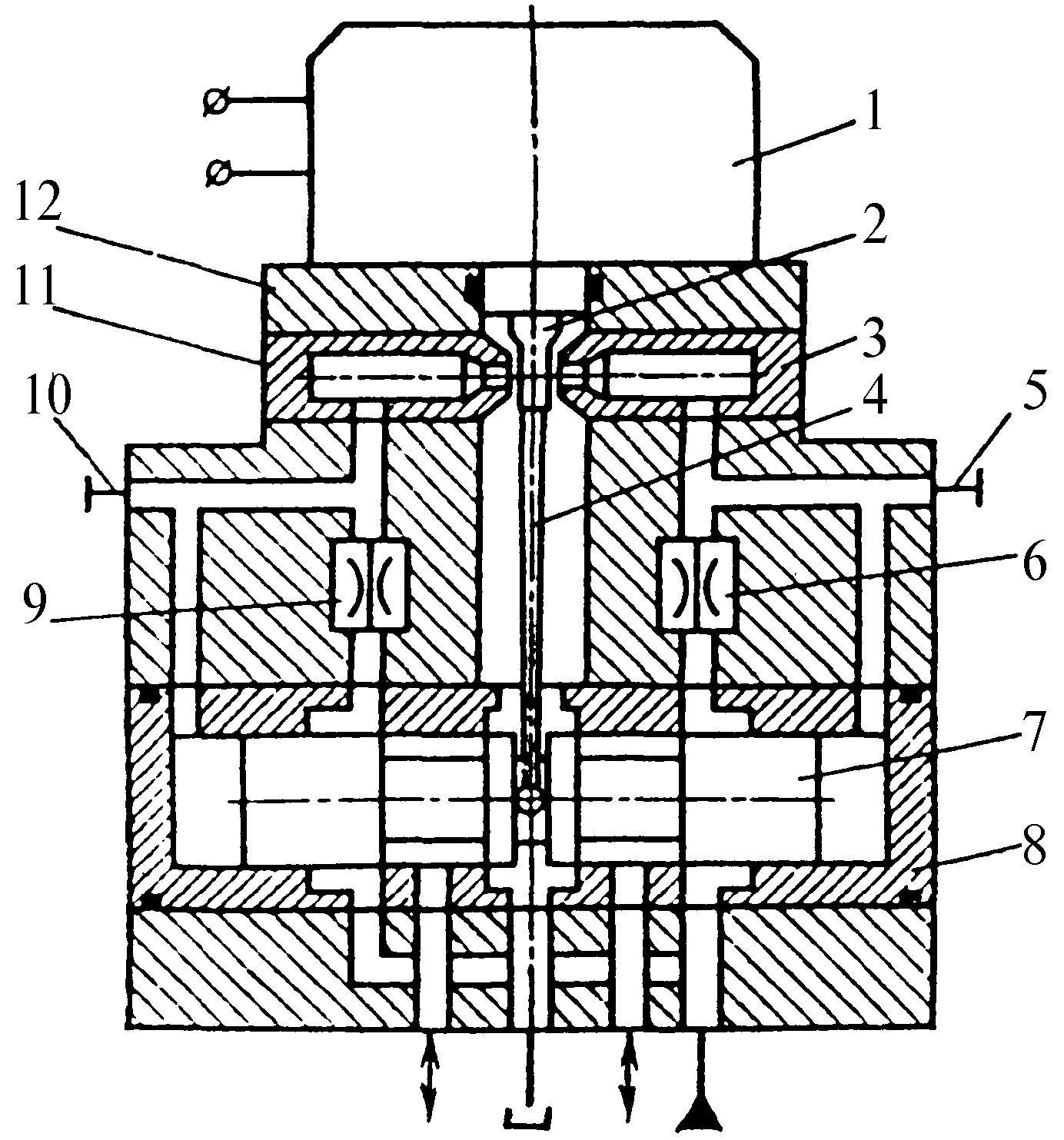
Рис.6.11. Схема двухкаскадного электрогидравличеекого усилителя мощности с силовой обратной связью по положению
В реальных ЭГУ такой конструкции в переходном процессе максимальное перемещение заслонки достигается при приращении тока управления, равном 5–20% его максимального значения. Это увеличивает рабочий ход заслонки до значений, которые соизмеримы с величиной начального зазора между соплами и заслонкой. Последнее обеспечивает более полное использование подводимой к ГУ энергии рабочей жидкости. Благодаря получению максимальных усилий, действующих на золотник, сокращается влияние сил контактного трения золотника на зону нечувствительности статической характеристики ЭГУ. Устранить полностью влияние указанных сил не удается. Это объясняется тем, что создаваемый этими силами перепад давления на торцах золотника через отверстия в соплах воздействует на заслонку и передается на вал электромеханического преобразователя в виде дополнительного момента. Так как этот момент прикладывается с отрицательным знаком (отрицательная обратная связь по давлению нагрузки на золотнике), то золотник не доходит до нужного положения, которое определяется величиной электромагнитного момента.
Сократить влияние отрицательной обратной связи по давлению нагрузки в исполнительных линиях первого каскада ГУ можно путем применения вместо распределителя сопло–заслонка распределителя со струйной трубкой. Широкое распространение получают двухкаскадные ЭГУ с силовой обратной связью по положению. В них в качестве первого каскада гидравлического усиления используются распределители со струйной трубкой и струйные распределители с механическим отклонением струи.
Применение для этих целей распределителя со струйной трубкой, помимо исключения вредного влияния отрицательной обратной связи по давлению нагрузки в исполнительных линиях первого каскада усиления, позволяет решить проблему дрейфа нуля при изменении температуры масла.
Дрейф нуля при изменении температуры масла в распределителях сопло–заслонка вызван неравномерным изменением коэффициента расхода его дросселей при изменении режима течения, так как дроссели, изготовленные даже в одинаковых условиях, имеют различную микрогеометрию из-за влияния допусков и разную микро-шероховатость поверхностей дросселирующих каналов и отверстий. Сокращению влияния температуры масла на уход нуля в распределителях сопло–заслонка способствуют высокая точность изготовления и селективный подбор их элементов после экспериментального определения проливочных характеристик в различных температурных условиях. Для распределителя со струйной трубкой эта задача решается проще, так как стабильность нуля их характеристик заложена в принципе их действия.
Общим недостатком рассмотренных ЭГУ является уменьшение скорости золотника с появлением сил, препятствующих его движению, что объясняется дроссельным эффектом. Дроссельный эффект заключается в изменении расхода в исполнительных линиях распределителя при изменении давления нагрузки. Это явление при росте сил, препятствующих перемещению золотника, сокращает его скорость, что уменьшает быстродействие ЭГУ.
В ЭГУ, служащих для управления мощными потоками масла, воздействие сил на золотник оказывается существенным. Для уменьшения их влияния обычно идут на увеличение каскадов гидравлического усиления до трех. Это усложняет конструкцию ЭГУ, увеличивает стоимость и сложность регулировки.
Электрогидравлические усилители с силовой обратной связью по положению и дополнительной обратной связью по скорости регулирующего элемента второго каскада. Схема ЭГУ с силовой и дополнительной связью приведена на рис.6.12. Нечувствительность его статических характеристик к силам, действующим на управляющий элемент второго каскада гидравлического усиления, позволяет использовать его для управления РДР и другими устройствами управления, которые не могут быть выполнены заодно с ЭГУ. Место стыковки ЭГУ и регулирующего элемента устройства управления обычно содержит эластичные уплотнения, в которых всегда присутствуют силы контактного трения. Кроме того, использование такого ЭГУ решает ряд проблем, связанных с несимметрией возмущающих сил и загрязненностью рабочих жидкостей.
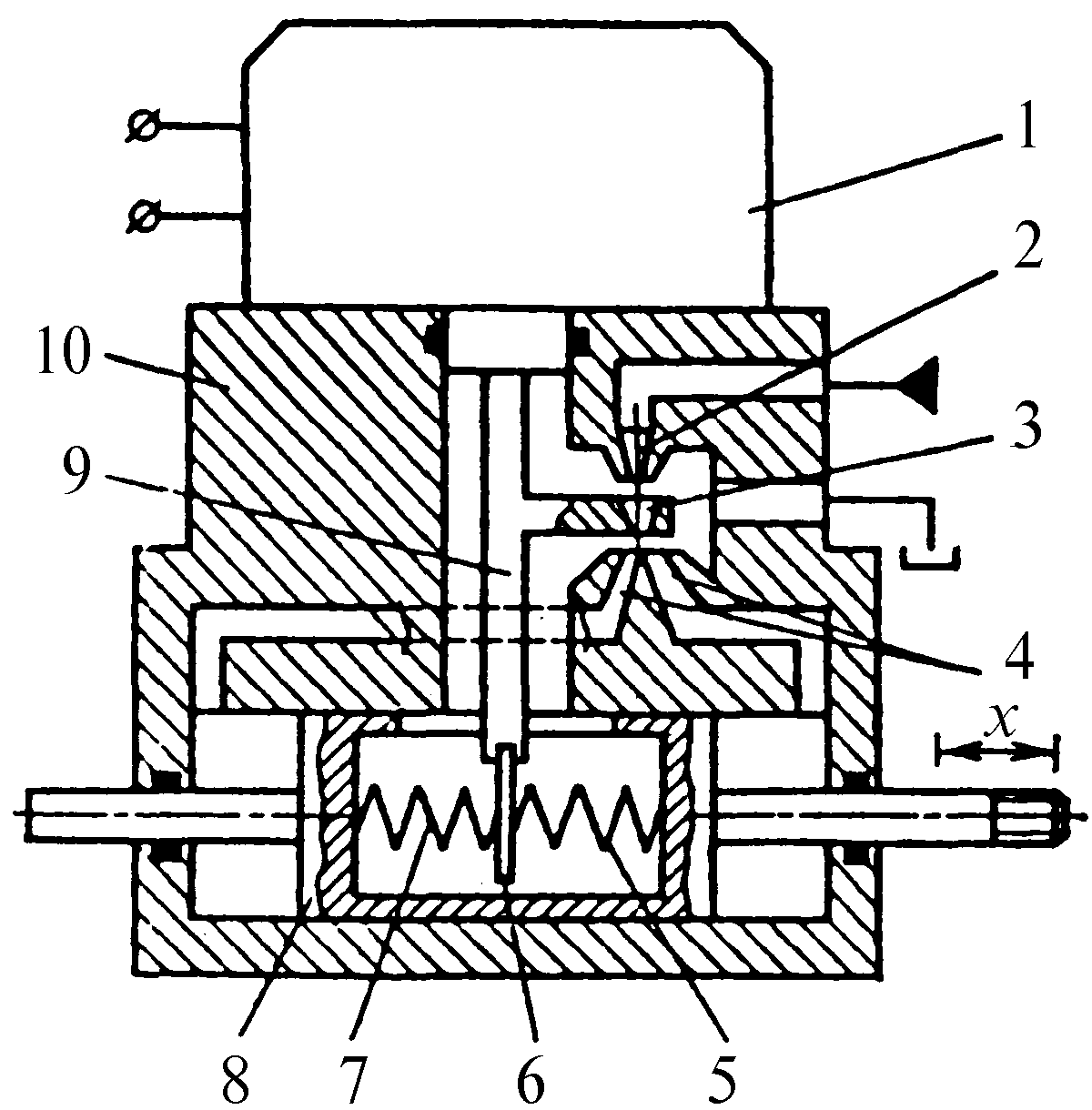
Рис.6.12. Схема однокаскадного электрогидравлического усилителя мощности с силовой обратной связью по положению и дополнительной обратной связью по скорости
ЭГУ (см. рис.6.12) содержит закрепленные на корпусе 10 электромеханический преобразователь 1, распределитель, состоящий из сопла питания 2, отклоняющего струю питания насадка 3 и приемных окон 4, цилиндр 8 и узел обратной связи по скорости и по положению, состоящий из диска 6 и пружин обратной связи 5 и 7. Усилие обратной связи по положению поршня 8 через пружины 5 и 7, рычаг 9 передается на вал электромеханического преобразователя 1. Течение жидкости, которая заполняет полость поршня 8, при его движении вызывает в результате обтекания диска 6 усилие на диске, пропорциональное скорости поршня. Усилие обратной связи по скорости также через рычаг 9 передается на вал преобразователя. Сравнение момента обратной связи по скорости поршня с моментом электромагнитных сил, вызванных током управления, на валу электромеханического преобразователя при условии равенства нулю суммарной жесткости на валу этого преобразователя позволяет обеспечить независимость скорости поршня от нагрузки на нем.
Изменение величины скорости под действием нагрузки вызывает появление сигнала рассогласования, который приводит ее к заданной величине. Поэтому такой ЭГУ практически не чувствителен к нагрузкам на поршне и к изменению давления питания. Однако влияние вязкости жидкости на его динамику может оказаться существенным. Это объясняется тем, что силовое взаимодействие жидкости, размещенной в полом поршне, и диска зависит не только от скорости поршня, но и от вязкости жидкости.
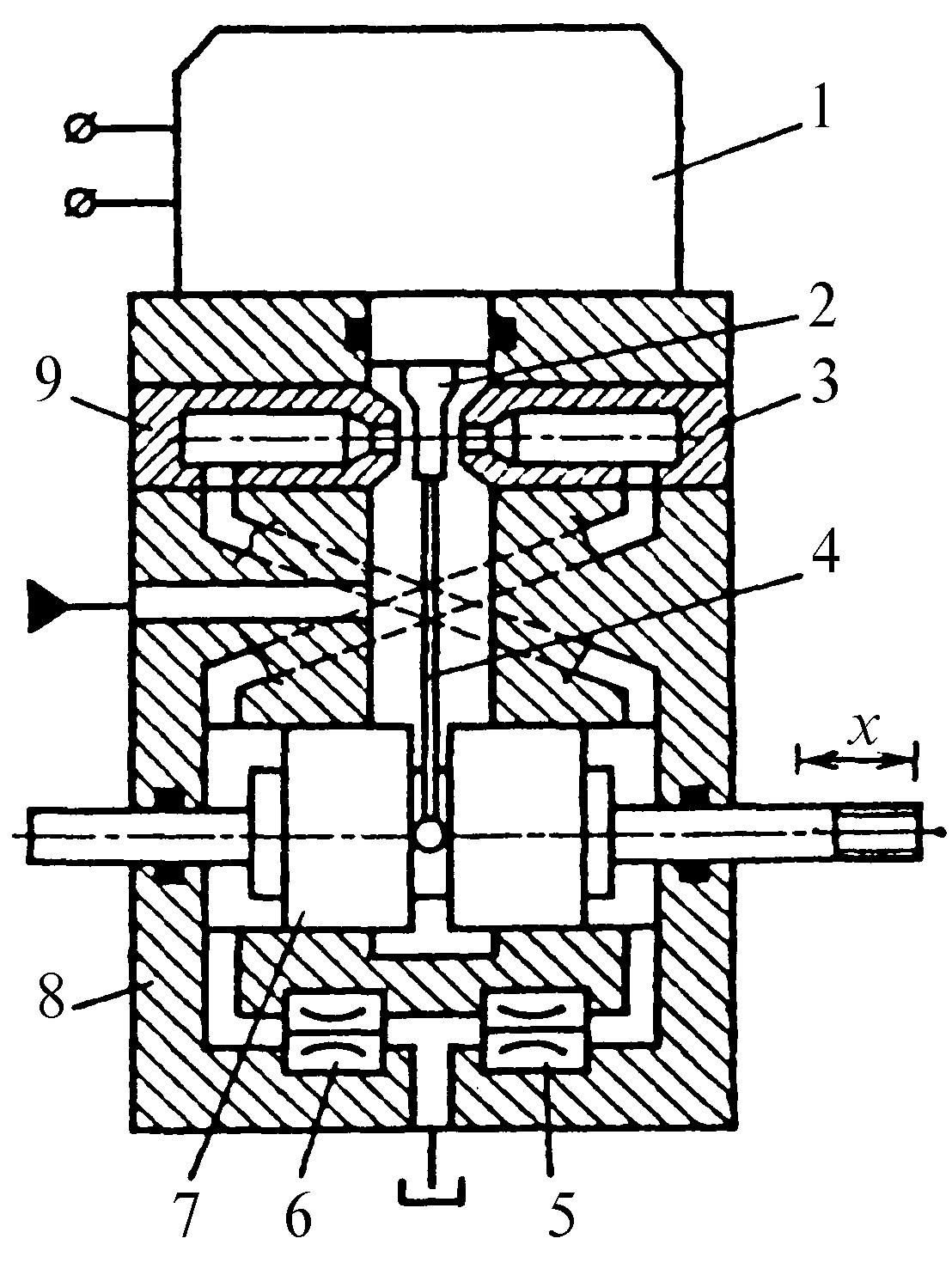
Рис.6.13. Схема однокаскадного электрогидравлического усилителя мощности с силовой обратной связью по положению и дополнительной положительной обратной связью по давлению нагрузки
Электрогидроусилитель с силовой обратной связью по положению и дополнительной положительной обратной связью по давлению нагрузки на управляющем элементе второго каскада (рис.6.13) состоит корпуса 8, в котором размещены: электромеханический преобразователь 1 с заслонкой 2 и пружиной 4 обратной связи, сопла 3 и 9, постоянные дроссели 5 и 6 и цилиндр 7. Давление напора подводится со стороны заслонки. Жидкость сначала попадает через зазор между соплами и заслонкой в междроссельные камеры ГУ, а затем через постоянные дроссели – на слив. В результате возникает положительная обратная связь по давлению нагрузки на ведомом звене ГУ. Обратная связь при росте нагрузки увеличивает смещение заслонки и создает в исполнительных линиях распределителя перепад давления, преодолевающий эту нагрузку.
Электрогидравлические усилители мощности с обратной связью по расходу служат для преобразования электрического сигнала управления в пропорциональный и усиленный по мощности расход рабочей жидкости в исполнительных линиях, величина которого не зависит от давления нагрузки. С увеличением давления нагрузки расход в исполнительных линиях уменьшается. Для обеспечения пропорциональности этого расхода электрическому сигналу управления и независимости его от давления нагрузки, ЭГУ оснащается специальными механическими датчиками расхода, которые сравнивают расход в исполнительных линиях с сигналом управления и пропорционально сигналу рассогласования перемещают золотник на величину, компенсирующую отличие расхода от заданного.
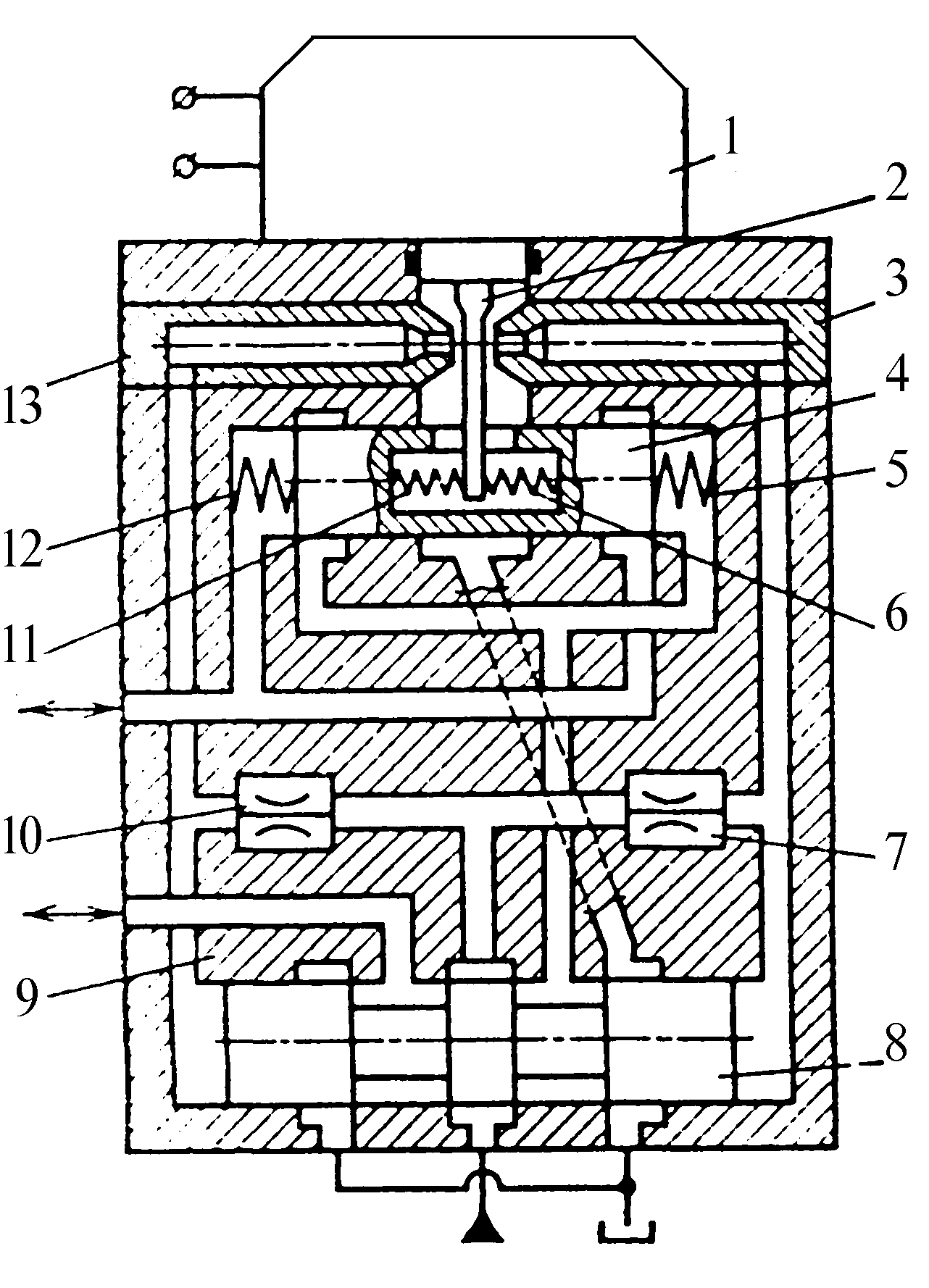
Рис.6.14. Схема двухкаскадного электрогидравлического усилителя мощности с обратной связью по расходу
На рис.6.14 дана схема двухкаскадного ЭГУ с обратной связью по расходу. ЭГУ содержит электромеханический преобразователь 1; распределитель сопло–заслонка, состоящий из заслонки 2, сопел 3 и 13, постоянных дросселей 7 и 10; золотниковый РДР 8 и датчик расхода. Последний состоит из плунжера 4 с двумя рабочими окнами, центрирующих пружин 5 и 12 и пружин 6 и 11 обратной связи. Все элементы ЭГУ расположены в корпусе 9.
Когда ток управления подается в обмотки электромеханического преобразователя 1, на его валу возникает электромагнитный момент сил, который перемещает заслонку 2 из нейтрального положения. Из-за изменения гидравлического сопротивления регулируемых дросселей сопло–заслонка золотник РДР 8 передвигается из нейтрального положения со скоростью, пропорциональной смещению заслонки 2. В результате смещения золотника РДР 8 в исполнительных линиях последнего образуется поток, который, проходя через двигатель, например, попадает к сливным рабочим окнам этого распределителя, а затем к торцу плунжера 4 датчика расхода. На торцах датчика расхода появляется перепад давления, который, преодолевая сопротивление центрирующих пружин 5 и 12, смещает плунжер 4 из нейтрального положения. Прямоугольность рабочих окон датчика расхода и относительно малая величина рабочего хода плунжера 4 обеспечивают пропорциональность его перемещения расходу в исполнительных линиях. Посредством пружин 6 и 11 обратной связи движение плунжера 4 преобразуется в момент сил обратной связи по расходу. Этот момент (с учетом знака) суммируется с моментом электромагнитных сил. Как только эти два момента сил уравниваются по абсолютной величине, заслонка 2 возвращается в нейтральное положение, и золотника РДР 8 возвращается. Положение останова золотника определяется величиной тока управления и расхода в исполнительных линиях.
При появлении давления нагрузки в рабочих камерах РДР 8 за счет дроссельного эффекта изменяется и расход в исполнительных линиях. Это приводит к перемещению плунжера 4 датчика расхода, который смещает заслонку 2. Это приводитк дополнительному смещению золотнику РДР 8, который доводит расход в исполнительных линиях до заданного значения.
Основным недостатком, ограничивающим применение таких ЭГУ, является несоответствие расхода в исполнительных линиях скорости подключенных к ним двигателей из-за сжимаемости жидкости в их рабочих полостях. Поэтому устойчивая работа следящих систем, включающих ЭГУ с указанной обратной связью, возможна только при работе с ненагруженными двигателями. Если имеются даже незначительные инерционные нагрузки, такие следящие системы становятся неустойчивыми. Их устойчивость можно обеспечить только путем введения дополнительных корректирующих устройств. Разновидностью ЭГУ с обратной связью по расходу является однокаскад-ный ЭГУ, схема которого приведена на рис.6.15. Здесь в качестве сигнала отрицательной обратной связи по расходу используется осевая динамическая сила, которая в общем случае пропорциональна расходу жидкости через рабочие окна РДР и направлена в сторону закрытия его рабочих окон, т.е. имеет отрицательное направление.
Этот ЭГУ включает электромеханический преобразователь 8, на валу 7 которого закреплено водило 4, РДР, состоящий из плоского золотника 2, закрепленного на пружинных шарнирах, и основания 1. Водило 4 с золотником 2 связано посредством поводка 9. Золотник и электромеханический преобразователь установлены на корпусе 10 и ограничены крышкой 3. Для регулировки ЭГУ служат
пружины 5 и регулировочный винт 6.
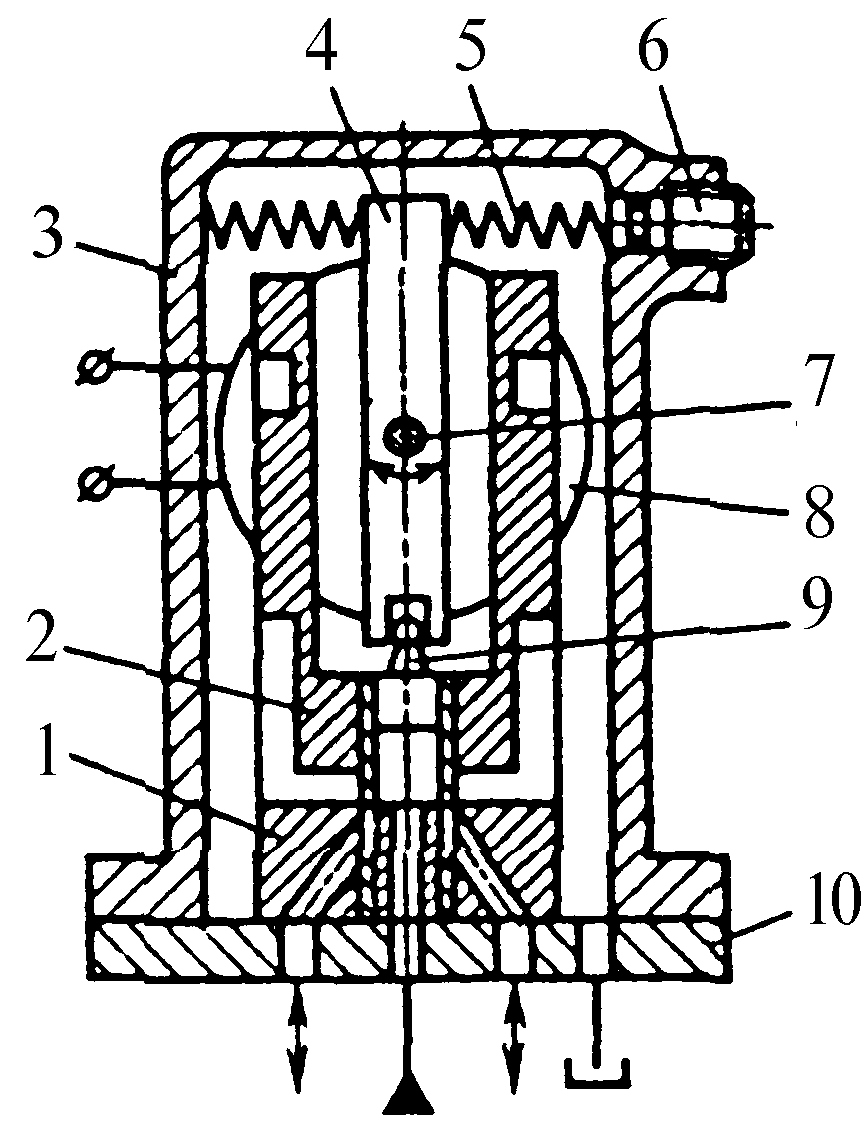
Рис.6.15. Схема однокаскадного электрогидравлического усилителя мощностьи с обратной связью по расходу
Отсутствие сил контактного трения в подвешенном на плоских пружинах золотнике обеспечивает хорошее прохождение сигнала обратной связи по расходу. На валу электромеханического преобразователя сравниваются два момента сил: один, обусловленный током управления, а другой - осевой динамической силой, т.е. расходом через исполнительные линии. Обратная связь по расходу существенно влияет на вид статических характеристик ЭГУ. Они становятся жесткими, т.е. расход через исполнительные линии таких ЭГУ не зависит от давления нагрузки, а определяется только величиной тока управления.
Электрогидравлические усилители мощности с обратной связью по давлению нагрузки. Такие ЭГУ предназначены для преобразования электрического сигнала управления в пропорциональный перепад давления в исполнительных линиях, не зависящий от расхода в них. Принцип их действия основан на сравнении перепада давления в исполнительных линиях с перепадом давления в предварительном каскаде усиления. Эти ЭГУ используют в различных испытательных машинах и нагружателях. Применение таких ЭГУ позволяет заменить трудно осуществимые натурные испытания стендовыми испытаниями.
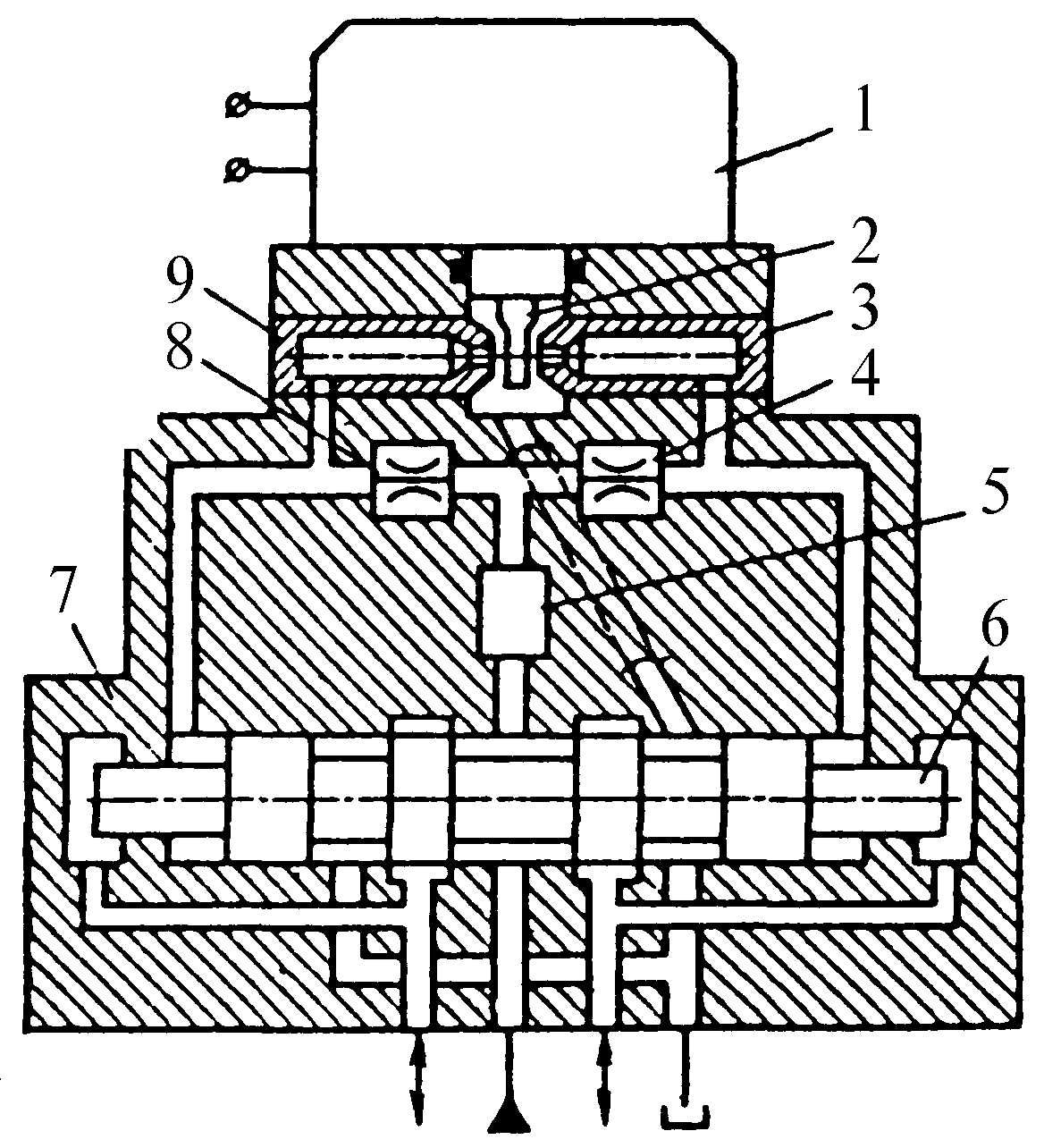
Рис.6.16. Схема двухкаскадного электрогидравличеекого усилителя мощности с обратной связью по давлению нагрузки
Схема ЭГУ с указанной связью показана на рис.6.16. Сигнал управления посредством электромеханического преобразователя 1 и распределителя сопло-заслонка, состоящего из сопел 3 и 9, постоянных дросселей 4 и 8 и заслонки 2, преобразуется в перепад давления, который заводится на ближние к золотнику 6 камеры управления. Две других крайних камеры управления соединены соответствующим образом с исполнительными линиями ЭГУ. Питание гидроусилителя сопло-заслонка производится через специальное устройство 5, стабилизирующее давление питания. Все элементы установлены в корпусе 7. При появлении тока управления заслонка 2 сместится из нейтрального положения, и под действием перепада давления в камерах управления, расположенных ближе к золотнику распределителя, золотник начнет перемещаться в осевом направлении, соответствующем направлению смещения заслонки 2. Линии обратной связи включены таким образом, чтобы обратная связь по давлению нагрузки была отрицательной. Как только осевые усилия на золотнике 6, создаваемые перепадом давления в междроссельных камерах распределителя сопло-заслонка и перепадом давления в исполнительных линиях золотникового распределителя, станут равны, золотник 6 остановится. Если за счет изменения расхода в исполнительных линиях перепад давления изменится, то изменится и соотношение сил, действующих на золотник 6, что приведет к его дополнительному смещению, которое восстановит перепад давления в исполнительных линиях золотникового распределителя до заданного перемещением заслонки, т.е. током управления.
