
Широкое распространение в станках и промышленных роботах (ПР) с ЧПУ получили ЭГП с управлением от задающих электрических дискретных (шаговых) двигателей (ШД). Последние позволяют преобразовывать дискретные электрические сигналы управления, поступающие от электронной системы ЧПУ, в дискретный поворот выходного вала с определенным углом поворота на каждый импульс, который называется угловым шагом.
Шаговые двигатели имеют высокое быстродействие и развивают на выходном валу крутящий момент, достаточный для перемещения золотника регулируемого дросселирующего распределителя (РДР) напрямую или через несиловую винтовую передачу без промежуточного гидроуправления. В ЭГП станков с ЧПУ широкое применение в качестве исполнительных и управляющих элементов получили шаговые электродвигатели ШД-4, ШД-5. Угловой шаг, например, шагового электродвигателя типа ШД5-Д1М составляет 1,5°; крутящий момент 40 Н·см; максимальная частота подачи импульсов 8000 имп/с и максимальная частота следования испульсов (частота приемистости) 2000 имп/с.
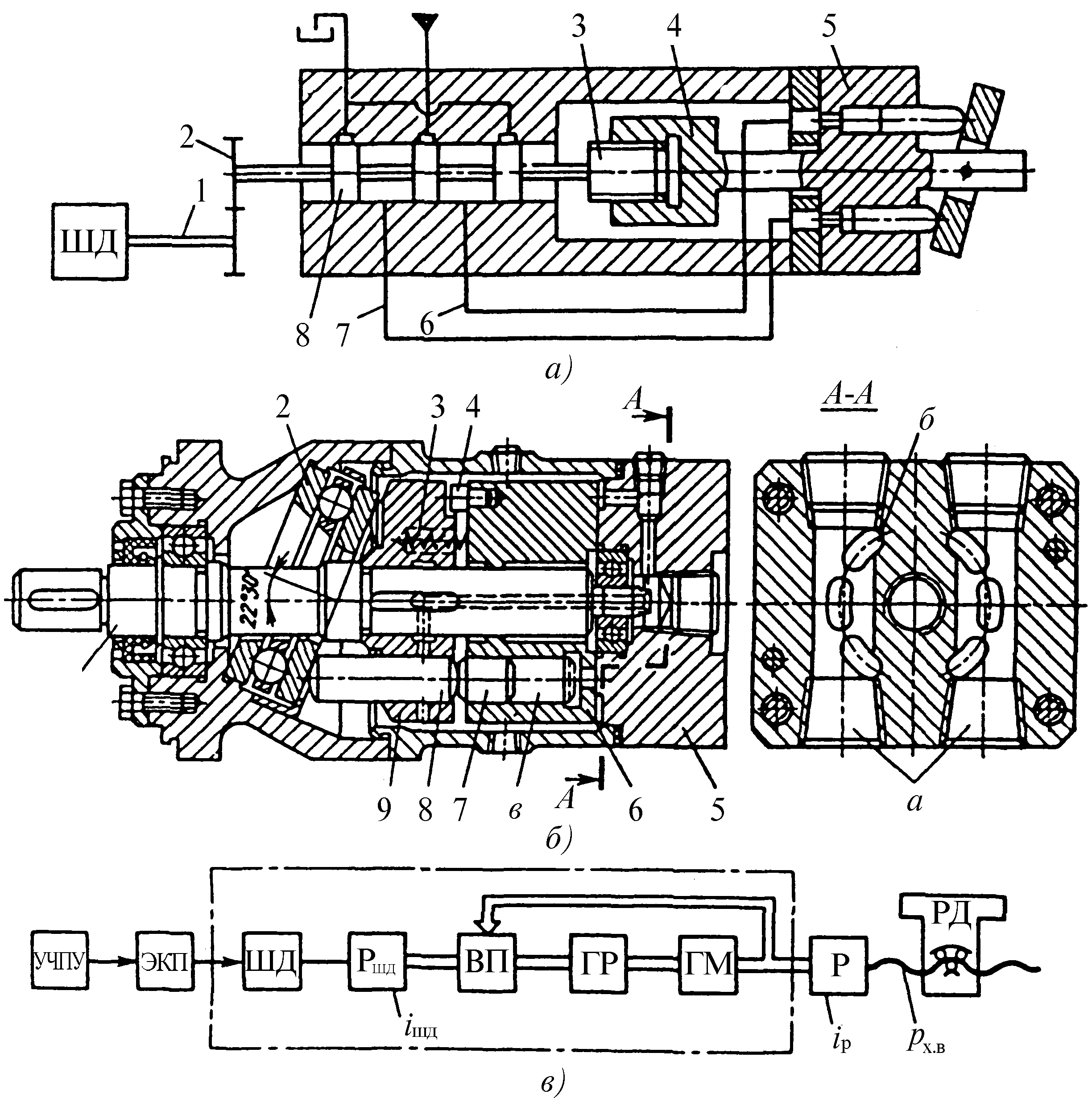
Рис.6.41. Шаговый электропривод: а - конструктивная схема; б - аксиально-поршневой гидромотор; в - структурная схема привода с гидроусилителем момента и импульсной системой ЧПУ для одной координаты
Конструктивная схема ЭГП, состоящего из ШД и гидравлического усилителя моментов (ГУМ), показана на рис.6.41а. ШД отрабатывает импульсы, поступающие из системы ЧПУ. При отработке импульса вал 1, поворачиваясь, через редуктор 2 заставляет вращаться винт 3, ввернутый в гайку 4, жестко соединенную с ротором гидромотора 5. При неподвижном гидромоторе (ГМ) поворот винта заставит соединенный с ним золотник 8 переместиться, например, вправо от среднего положения, в результате чего в трубопроводе 6, идущем от золотника к ГМ, повысится давление, а в трубопроводе 7 – понизится, и образовавшийся перепад давления создаст крутящий момент на ГМ. Поворачиваясь, ротор ГМ повернет гайку 4, которая через винт 3 возвратит золотник в среднее положение. При непрерывной подаче импульсов на ШД вал ГМ будет вращаться со скоростью, пропорциональной частоте импульсов, и золотник будет смещен от среднего положения на величину, обеспечивающую пропуск масла, необходимого для вращения ротора ГМ.
В приводах станковсЧПУ нашли применение нерегулируемые аксиально-поршневые ГМ серии Г15–2 с торцовым распределением масла (рис.6.41б). Они обладают наилучшими из всех типов ГМ габаритными и массовыми характеристиками, отличаются компактностью, высоким КПД. Эти ГМ пригодны для работы при высоких частотах вращения и давления, обладают сравнительно малой инерционностью. Малый момент инерции вращающихся частей имеет существенное значение при использовании их в качестве ГМ. Важным параметром является приемистость (быстродействие) насоса при регулировании подачи. Изменение подачи от нулевой до максимальной осуществляется в некоторых типах насосов за 0,04 с и от максимальной до нулевой за 0,02 с. Наиболее распространенное число цилиндров равно 7–9, диаметры цилиндров 10 до 50 мм. Частота вращения 1000–2500 об/мин; давление до 40 МПа. Мощность до 100 кВт, КПД до 93 %. Удельная металлоемкость аксиальных гидромашин (кг/кВт) в 5–15 раз меньше, чем у электромашин.
ГМ работает следующим образом. Поток масла, нагнетаемый насосом, поступает в одну из полостей а и через окна б крышки распределителя 5 подается в цилиндры b блока цилиндров 6 под поршни 7. Сила давления масла через поршни 7 и толкатели 8 передается на наклонный радиально-упорный шарикоподшипник 2, на котором возникает сила, создающая крутящий момент, который передается на выходной вал 1 через толкатели 8 и барабан 9. Блок цилиндров приводится во вращение поводком 4 и постоянно прижимается к крышке-распределителю 6 пружиной 3. Реверс вала ГМ осуществляется изменением подвода масла в полости 3 крышки-распределителя 6.
В приводе с золотником осевого перемещения исключен ряд недостатков конструкции ГУ момента с поворотным золотником. Так, путем изменения передаточного отношения редуктора и шага винтовой пары можно в широких пределах изменять коэффициент усиления в прямой цепи воздействия и в обратной связи привода. В результате длину рабочего окна и его проходное сечение выполняют достаточным для пропуска больших потоков масла к ГМ, и, таким образом, гидравлическая часть привода не лимитирует скорость привода.
Структурная схема привода с ГУ момента и импульсной системой ЧПУ для одной координаты показана на рис.6.41в. Устройство ЧПУ (УЧПУ) выдает импульсы, которые в электронном кодовом преобразователе ЭКП усиливаются и преобразуются в форму, необходимую для управления ШД. Управление посредством преобразователя ВП и гидрораспределителя ГР приводит к повороту вала ГМ. Через редуктор Р и шариковую пару сообщается движение РО станка. Штрих-пунктирной линией обозначен следящий привод, имеющий внутреннюю обратную связь по положению.
Привод с поворотным золотником осевого перемещения и импульсной системы ЧПУ так же, как и привод с поворотным золотником, имеет ограниченную точность в связи с тем. что привод разомкнут (нет обратной связи по перемещению от РО) и возможна потеря импульсов.
Выпускают электрогидравлические шаговые приводы подач ЭГШП (ГУ) для металлообрабатывающих станков типа ЭГ32Г18-2, Э32Г18-3 и электрогидравлические поворотные следящие приводы типа СП. Приводы предназначены для перемещения РО станков и других машин с ЧПУ в соответствии с электроимпульсами, подаваемыми на вход. Величина перемещения определяется числом поданных импульсов, а скорость - частотой их следования. Приводы работают на чистых минеральных маслах с кинематической вязкостью от 20 до 2000 Ст при температуре от 3 до 50° C. Температура окружающей среды от 5 до 50° C. Тонкость фильтрации 10 мкм Приводы состоят из аксиально поршневого гидромотора, следящего устройства, соединенного с валом ГМ и ШД. По виду конца выходного вала ГУ выпускаются с цилиндрическим концом (ЭГ32Г18-32; Э32Г18-33; Э32Г18-34; Э32Г18-35); с коническим концом (32Г18-32К; Э32Г18–33К; Э32Г18-34К; Э32Г18-35К).
В ЭГШП вращательного движения (типа Э32Г18-2) электрические управляющие импульсы поступают на ШД (рис.6.42).
Вращение его выходного вала передается на гайку 1, зафиксированную от осевого смещения. В зависимости от направления вращения гайки винт 2, связанный с золотником РДР, перемещается влево или вправо и сдвигает золотник относительно его среднего положения. Масло под давлением поступает в рабочие полости ГМ так, что направление вращения выходного вала ГМ совпадает с направлением вращения вала ШД.

Рис.6.42. Схема электрогидравлического шагового привода вращательного движения типа Э32Г18-2
Винт 2 своим вторым концом связан с валом ГМ через шлицевую муфту 3. Поэтому при вращении этого вала винт вворачивается вгайку или выворачивается из нее, перемещаясь вдоль оси по направлению к нейтральному положению РДР.
Если вал ШД повернется на какой-нибудь угол и остановится, то вал ГМ повернется на такой же угол. Если же вал ШД будет вращаться с постоянной угловой скоростью, то вал ГМ будет вращаться с такой же частотой, но с некоторым отставанием по углу (рассогласованием по положению). После остановки вала ШД вал ГМ «догонит» его и остановится в том же угловом положении с точностью менее одного импульса.
Крутящий момент на выходном валу ГМ в 100 и более раз превышает моментна валу ШД, поэтому элементы привода, за исключением задающего ШД, представляют собой гидравлический усилитель крутящих моментов, выполненный в виде следящего гидропривода вращательного (ротационного) движения с механической обратной связью. В ЭГШП задающим устройствомявляется винтовая передача, включающая гайку 1 и винт 2. Обратная связь по положению выходного вала ГМ выполненаотэтого вала через шлицевую муфту 3. РДР имеет электромеханическое управление без промежуточного гидроуправления.
В станках и ПР часто требуется выполнять поступательное перемещение РО, а при использовании приводов вращательного движения приходится применять сложные в изготовлении силовые шарико-винтовые передачи или менее точные зубчато-реечные передачи. ЭГП поступательного движения позволяют в этих случаях упростить кинематику приводов подач и соответственно уменьшить их размеры, вес, стоимость, а также повысить надежность работы.
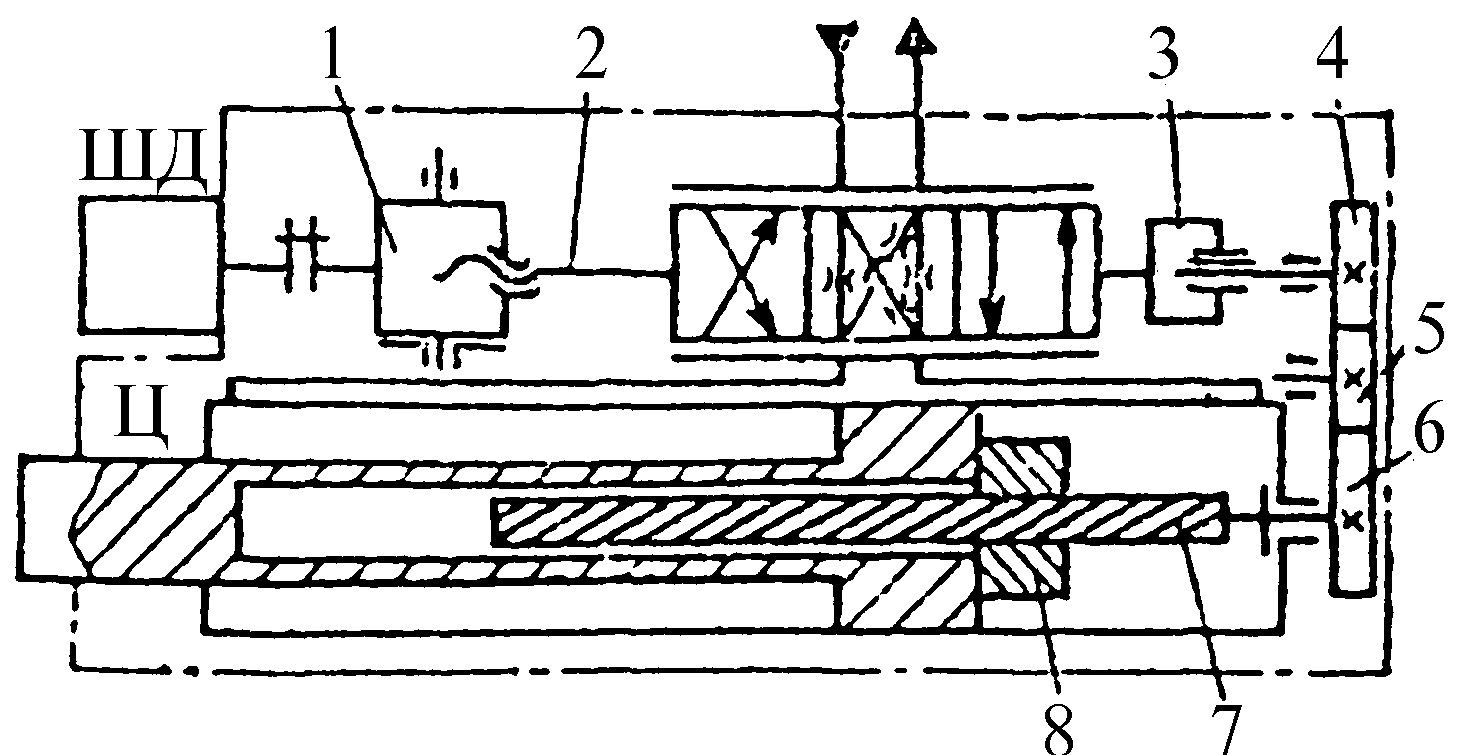
Рис.6.43. Схема линейного электрогидравличеекого шагового привода типа Г28-2
В линейном электрогидравлическом шаговом приводе (ЛЭГШП) типа Г28-2 узел управления полностью унифицирован с приводом вращательного движения. Электрические управляющие импульсы подаются на ШД (рис.6.43). Поворот вала ШД через гайку 1 и винт 2 вызывает смещение золотника РДР. Масло под давлением поступает в рабочие полости гидроцилиндра (Ц), его поршень и шток перемещаются. Гайка 8 с трехзаходной несамотормозящей трапецеидальной резьбой закреплена на поршне.
При работе привода шток соединен с РО (не показан) и удерживается от проворота, поэтому при движении поршня гайка 8 перемещается только вдоль оси и вызывает вращение винта 7, который установлен на подшипниках в крышке Ц. От винта 7 вращение передается через шестерни 6, 5, 4 и шлицевую муфту 3 винту 2. Винт вворачивается в гайку 1 или выворачивается из нее, смещает золотник РДР в сторону среднего положения.
Таким образом осуществляется обратная связь по положению внутри следящего гидравлического привода между поворотом гайки 1 (вход) и перемещением штока Ц (выход). После отработки заданной программы вал ШД останавливается, шток Ц «отрабатывает» рассогласование, золотник РДР приходит в среднее положение и шток Ц останавливается в определенном положении.
Если под действием внешней нагрузки шток будет стремиться сместиться из этого положения, то через обратную связь это вызовет смещение золотника. Это вызывает появление на поршне дополнительного гидравлического усилия, направленного в сторону, противоположную смещению штока, т.е. на удержание штока в заданном положении.
Дискретность перемещения штока (цена импульса) зависит от соотношения шага передачи сравнивающего устройства «гайка 1-винт 2», шага (при многозаходной резьбе - хода) винтовой передачи обратной связи «гайка 8–винт 7» и передаточного отношения зубчатой передачи в обратной связи. В серийных ЛЭГШП типа Г-28-2 при угловом шаге ШД в 1,5° дискретность перемещения штока в зависимости от комбинации шестерен 4…6 составляет 0,05 или 0,1 мм.
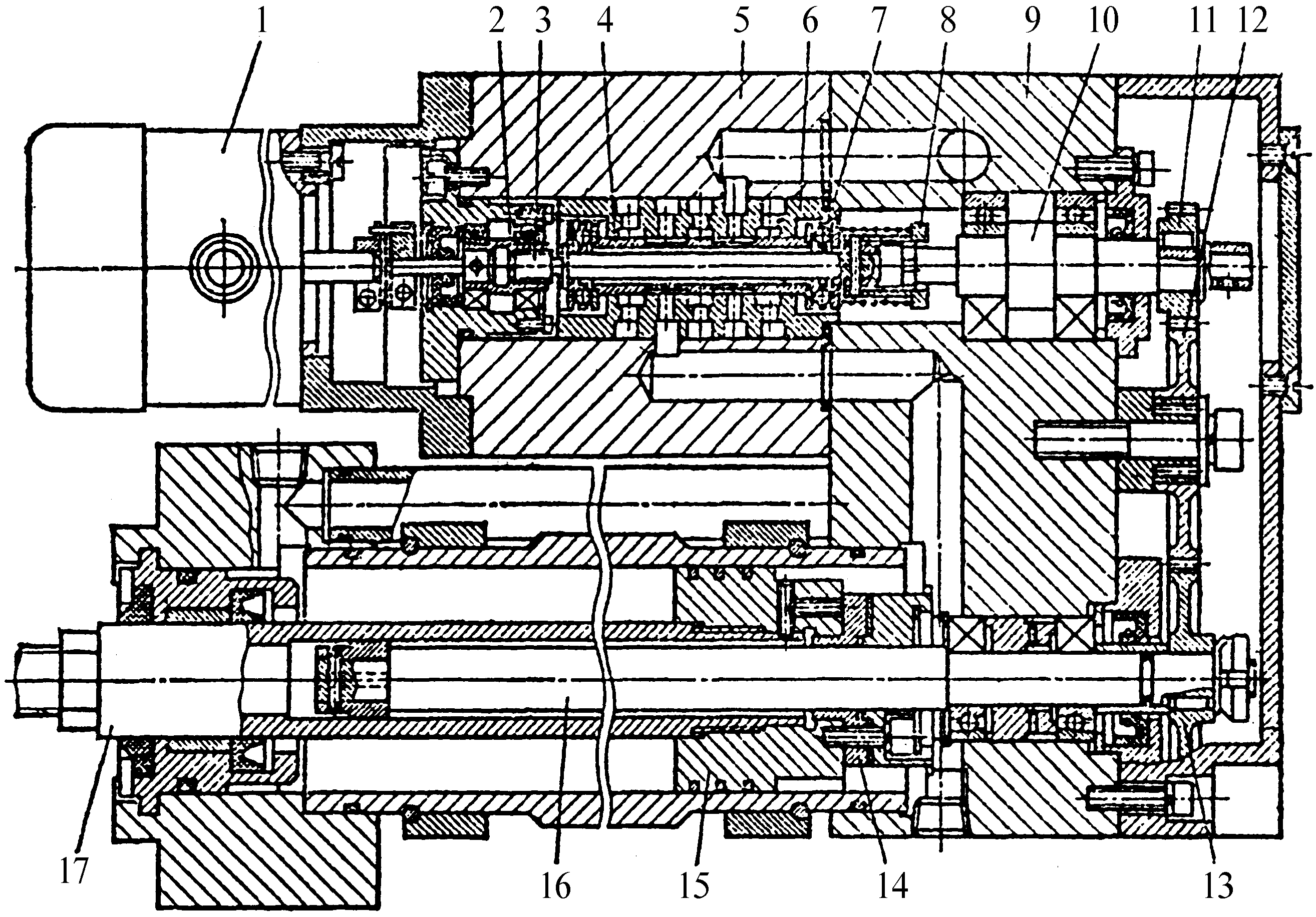
Рис.6.44. ЛЭГШП типа Г28-2
Рассмотрим конструкцию ЛЭГШП типа Г28–2 (рис. 6.44). Задающий ШД1соединяетсясвходным валиком РДР и гайкой 2 через повод-ковую муфту. Гайка установлена в радиально-упорных подшипниках и зафиксирована от осевого смещения. Резьба на винте 3 и в гайке 2 выполнена свысокой точностью, обеспечивающей осевой зазор в этой передаче не более 0,01 мм. Винт 3 проходит внутри золотника 4 и связан с ним через упорные подшипники 7.
Осевой зазор между винтом и золотником выбирается за счет усилия пружины. В корпусе 5 РДР запрессована втулка 6. В ней выполнены расточка и радиальные каналы, предназначенные для прохода масла. Золотник 4 и втулка 6 изготовленыиз закаленной стали, их взаимно сопряженные рабочие поверхности выполнены с высокой точностью. На правом конце винта 3 расположена втулка 8 с внутренними шлицами. Через них она соединяет винт с валиком 10, установленным на подшипниках в корпусе 9. На валике жестко закреплена шестерня 11. Промежуточная шестерня 12 свободно вращается на оси опоры. Шестерня 13 жестко закреплена на винте обратной связи 16.
Смещением опоры промежуточной шестерни выбирают зазоры в зубчатой передаче. Винт 16 смонтирован на радиально-упорных подшипниках в корпусе 9 и не имеет осевого зазора за счет предварительной затяжки подшипников. Гайка 14 с трехзаходной резьбой изготовлена из двух полугаек с прокладкой между ними. Путем пригонки прокладки по толщине до минимума уменьшают осевой зазор в несамотормозящей винтовой передаче обратной связи. Винт 16 входит внутрь полого штока 17, который жестко соединен с поршнем 15.
Каналы для подсоединения привода к гидросистеме выполнены в корпусе 5 РДР (не показаны). Канал подвода соединяется со средней проточкой втулки 6, канал слива – с двумя крайними проточками, а две средние проточки через каналы в корпусах 5 и 9 и трубу между корпусом 9 и передней крышкой цилиндров соединяются с полостями цилиндра.
Приводы изготавливают с несколькими вариантами крепления: фланцевого, на цапфах или лапах. Валик 10 жестко связан через механизм обратной связисперемещением штока. Благодаря этому квалику можно присоединять при необходимости электрические датчики положения или скорости движения выходного звена (штока) привода.
В ПР с ЧПУ грузоподъемностью свыше 40 кг для обслуживания станков ЭГП являются основным типом привода. В ПР портального типа, служащих для группового обслуживания станков по одной из координат, требуется обеспечить перемещение каретки длиной до 18 м, точность позиционирования в несколько десятых долей миллиметра при максимальной скорости перемещения 1,2 м/с.
Для перемещения каретки используют приводы вращательного движения в сочетании с зубчато-реечной передачей. При большой длине рейки задача выбора зазора в передаче является трудной. Для ее решения был разработан ЭГШП с двумя ГМ, работающими навстречу друг другу.
В этом случае реализовано еще одно важное преимущество гидравлического привода по сравнению с электрическим – гидравлические исполнительные двигатели всех типов могут работать на упоре (при ограничении движения выходного звена) без ограничения времени. При этом ГМ только создает усилиеиликрутящий момент на неподвижном выходном звене без какого-либо перегрева или поломки. Кроме того, выходное звено такого ГМ может перемещаться в обратную сторону под действием усилий, превосходящих его собственные.
Привод смонтирован на подвижной каретке 9 ПР, а рейка 8 – на неподвижной части – портале 10 (рис.6.45). При неподвижном валике 1 ШД золотник 3 устанавливается в нейтральное (нулевое) положение, при котором давления, подводимые в рабочие полости ГМ 4 и 6, равны по величине. Противоположные полости обоих ГМ соединены со сливом.
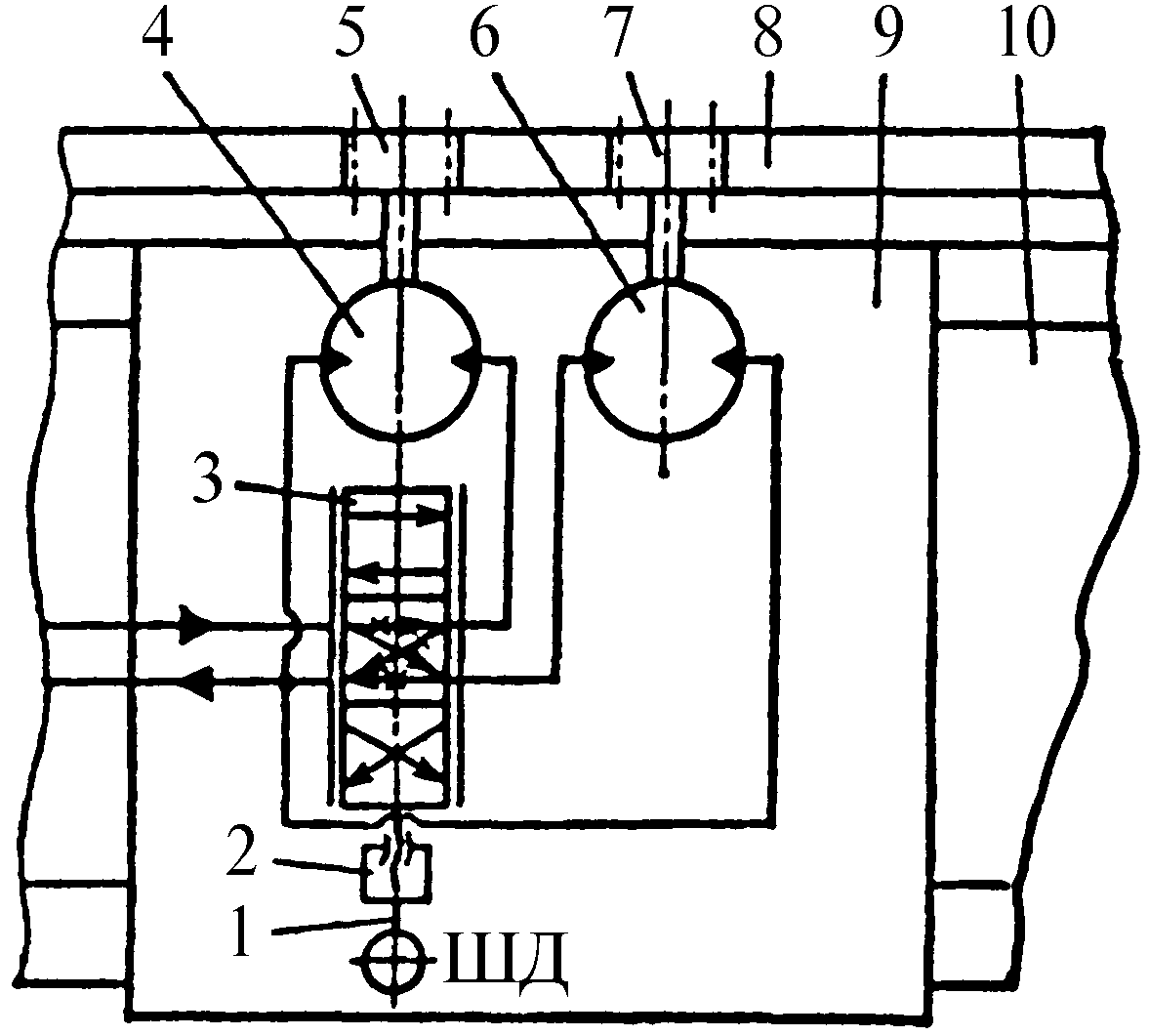
Рис.6.45. Схема ЭГШП типа Э32Г28-2Н с выборкой зазора и зубчато-реечной передачей
ГМ имеют одинаковый рабочий объем, поэтому развиваемые на их валах и соответственно шестернях 5 и 7 крутящие моменты равны по величине и направлены в противоположные стороны. При этом каретка 9 неподвижна. Вал ГМ 4 механически связан с винтом сравнивающего устройства (СУ) 2 и соответственно с золотником РДР.
Таким образом выполняется механическая обратная связь, и каретка удерживается в заданном положении в следящем режиме. При подаче управляющих импульсов на ШД гайка СУ поворачивается, золотник РДР 3 смещается. При этом давление в рабочей полости одного из ГМ повышается, а другого - уменьшается и соответственно нарушается равновесие сил на шестернях 5 и 7. Каретка 9 перемещается в заданном направлении и с заданной скоростью
Так как крутящие моменты двух ГМ всегда направлены в противоположные стороны, то зазоры в зубчато-реечных передачах постоянно «выбираются». Это исключает механические удары в передачах, повышает их долговечность и точность позиционирования каретки, а также повышает плавность разгона и торможения каретки.
При рассмотрении работы следящих гидравлических приводов рассмотренных типов отмечалась общая особенность - рассогласование и связанное с ним открытие рабочих щелей РДР, плавно увеличивающееся при нарастании заданной скорости движения РО. После прекращения подачи управляющих сигналов (или перемещения щупа) осуществляется окончательное позиционирование РО, и при этом рабочие щели РДР плавно прикрываются, даже при резком прекращении сигнала на входе. Это свойство следящих гидроприводов автоматически плавно затормаживать РО при позиционировании также использовано в конструкциях ПР большой грузоподъемности.
Электрогидравлический поворотный следящий привод типа СП служит для выполнения поворотных движений механизмов промышленных роботов, станков, прессов и других машин различного технологического назначения по программе, поступающей на привод в виде электрических сигналов от задающего устройства. В состав привода входят поворотный ГМ; РДР типа УГЭ8; регулируемый дроссель; предохранительные клапаны; переходные плиты и редуктор с датчиками обратной связи.
Величина скорости вращения выходного вала и его направление определяются величиной и полярностью электрического сигнала, поступающего на обмотку управления РДР.
Функции гидропривода при выполнении вспомогательных движений в станках расширяются. Так, в приводах главного движения токарных станков с ЧПУ гидропривод используют для автоматического регулирования величины натяжения ременных передач и переключения диапазонов скоростей в шпиндельной бабке. В сверлильно-фрезерно-расточных обрабатывающих центрах гидропривод применяют для перемещения и зажима спутников с заготовками, в механизмах перемещения измерительных щуповых головок; фиксации корпусов расточных головок с поднастройкой размера инструмента и др.