
Реализация схем приводов является важным аспектом в проектировании и эксплуатации различных механизмов и систем. Она включает в себя множество шагов, от выбора подходящих компонентов до интеграции и настройки системы.
Гидравлические схемы представляют собой наборы компонентов соединенные в системе для передачи энергии с использованием жидкости под давлением. Ниже приведены примеры основных гидравлических схем.
Типы гидравлических схем
Силовые гидравлические схемы
-
Простая силовая схема. Принципиальные гидравлические схемы содержат минимальное количество компонентов, таких как насос, распределительный клапан, цилиндр или мотор, и обратный клапан. Назначение этих гидравлических схем — прямая передача силы или движения от насоса к исполнительному органу (гидравлические схемы цилиндров).
-
С последовательным включением. Один из основных видов гидравлических схем. В этой схеме несколько цилиндров или моторов работают последовательно, то есть один привод активируется после завершения работы другого.
-
С параллельным включением. Все исполнительные элементы гидравлических схем работают одновременно. Для этого используются распределительные клапаны, регулирующие поток жидкости в различные части схемы.
Схемы управления
-
С ручным управлением. Управление потоком жидкости осуществляется вручную через механические рычаги, управляющие распределительными клапанами.
-
С электрическим управлением. Используются электромагнитные клапаны, которые переключаются электрическими сигналами, обычно от ПЛК или других систем автоматического управления.
-
С пропорциональным управлением. Включает пропорциональные клапаны, которые позволяют плавно регулировать скорость и направление движения исполнительного органа на основе управляющего сигнала.
Схемы регулирования
-
Регулирование давления. Используется для поддержания заданного уровня давления в системе. Включает предохранительные, редукционные и противодавления клапаны.
-
Регулирование расхода. Регулирует принципиальную скорость потока жидкости и, соответственно, скорость движения исполнительного органа. Применяются дроссели, расходомеры и регулируемые насосы.
-
Регулирование объема. Контролирует объем жидкости, поступающей в цилиндр или мотор, что позволяет управлять точным перемещением исполнительного органа.
Циркуляционные схемы
-
Замкнутая. Жидкость постоянно циркулирует по замкнутому контуру, проходя через насос, исполнительные органы и возвращаясь обратно в бак. Такая схема часто используется в системах с реверсивными моторами.
-
Открытая. Жидкость поступает в систему из бака и после прохождения через исполнительные органы возвращается в бак через фильтр. Это наиболее распространенный тип схемы, используемый в большинстве гидравлических систем.
Схемы защиты
-
С предохранительным клапаном. Включает основные предохранительные клапаны, которые защищают систему от избыточного давления, сбрасывая излишки жидкости обратно в бак.
-
С байпасным клапаном. Позволяет избежать принципиальной перегрузки насосов или других компонентов путем открытия обходного канала для жидкости при достижении критического давления.
Смесительные и раздельные схемы
-
Смесительная. Используется для смешивания потоков жидкости из разных источников в один общий поток. Это может быть необходимо для создания определенной смеси по температуре, давлению или составу.
-
Раздельная. Позволяет разделять поток жидкости на несколько каналов — для одновременного питания нескольких исполнительных органов.
Сложные комбинированные схемы
-
Включают в себя комбинации вышеописанных схем для выполнения сложных функций: управление несколькими гидравлическими приводами с различными требованиями по скорости, давлению и синхронизации (гидравлические схемы трубопроводов).
Как правильно читать гидравлические схемы
Как обозначаются гидравлические схемы и как их читать? Чтение схем требует понимания условно графического обозначения гидравлических схем, которые обычно рисуются в соответствии с международными стандартами. Эти стандарты определяют символы, которые используются для обозначения гидравлических элементов на схемах.
Условное обозначение гидравлических элементов на схемах
Насосы и моторы: обозначение насоса на гидравлической схеме обычно довольно просто: они изображаются кругами с треугольниками, показывающими направление потока.
Цилиндры: представлены прямоугольниками с линиями, указывающими поршень и шток.
Клапаны: изображаются в виде квадратов или прямоугольников, содержащих стрелки, кресты, буквы или линии, указывающие на тип и функцию клапана.
Фильтры и охладители: обычно изображаются кругом с горизонтальной линией, охладители — аналогично, но с дополнительными символами для воды или воздуха.
Чтение гидравлических схем — сложный процесс, поэтому нужно сперва нужно научиться читать изображения.
Схемы гидроприводов
Используя регулирующую и направляющую аппаратуру и применив один из известных способов регулирования скорости, можно создавать различные приводы, выполняющие необходимые условия работы. Так, на рис.2.124 показан привод, обеспечивающий жесткую остановку двигателя с использованием гидрозамка 3. При включении распределителя 5 с помощью электромагнитов Э1 и Э2 в левую или правую позицию жидкость своим потоком открывает замок, и совершается ход цилиндра 4 влево или вправо со скоростью, определяемой открытием дросселя 6, подсоединенного «на выходе» цилиндра. При включении распределителя 5 в среднюю позицию (оба электромагнита Э1 и Э2 отключены) подача насоса 1 прекращается, а обе полости цилиндра 4 соединяются с баком. Замок запирается и предотвращает выход рабочей жидкости из обеих полостей цилиндра, вследствие чего происходит остановка поршня. Клапан механизма давления 2 обеспечивает поддержание постоянного максимального давления в напорной линии насоса.
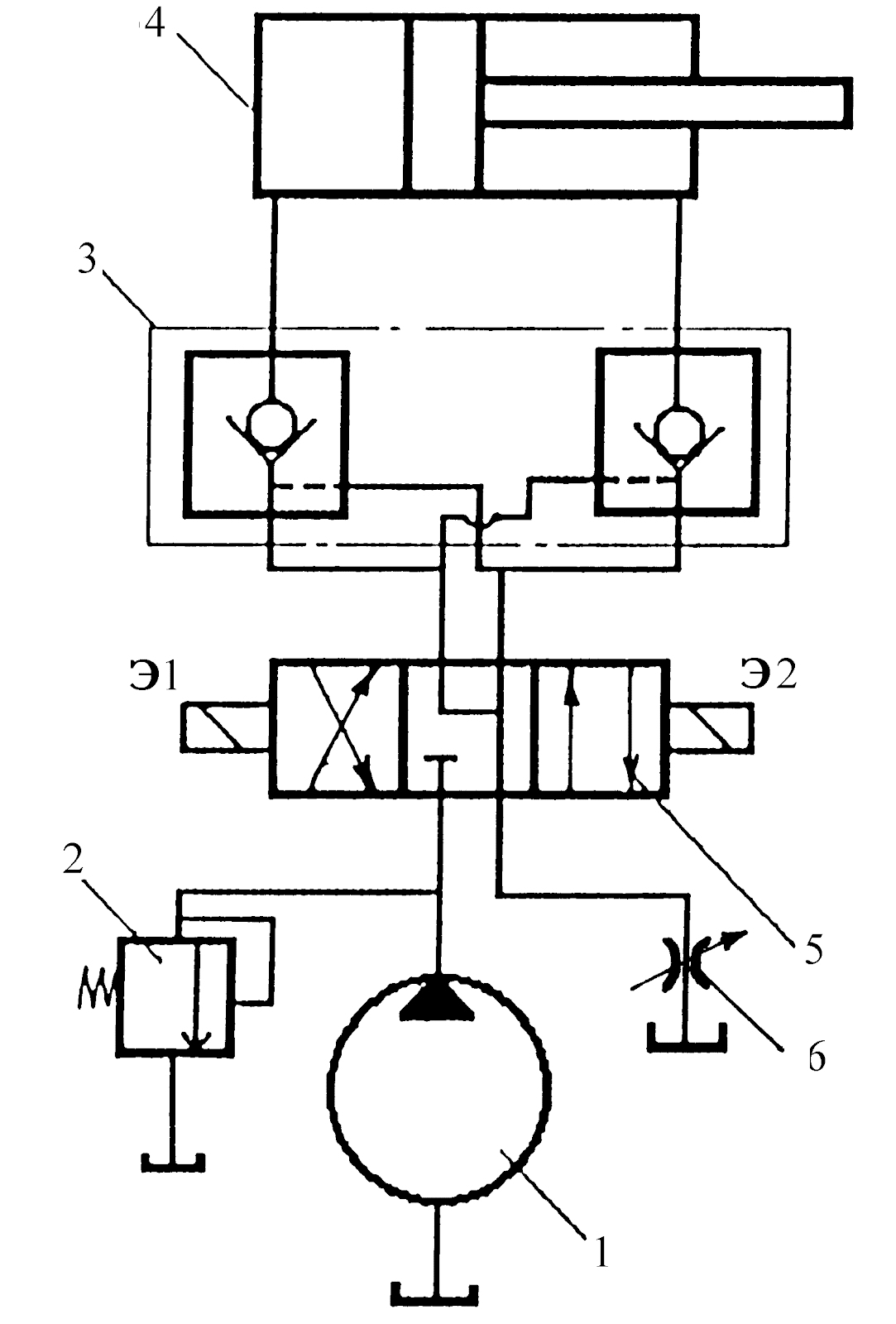
Рис.2.124. Привод с гидравлическим замком
На графическом рисунке 2.125 показан принцип работы гидравлической схемы привода, обеспечивающего последовательную работу двух цилиндров. При выключенном электромагните Э распределитель 2 типа 4/2 находится в левой позиции. Рабочая жидкость от насоса 1 поступает в правую полость цилиндра 5, и его поршень перемещается влево, вытесняя жидкость из левой полости через обратный клапан 4 и распределитель 2 в бак. Дойдя до жесткого упора (или до крышки цилиндра), он остановится, что приведет к росту давления перед клапаном 8. При достижении давлением необходимого уровня, настраиваемого пружиной клапана давления 8, он открывается и начинает пропускать рабочую жидкость в правую полость цилиндра 6. Его поршень станет двигаться влево, вытесняя жидкость из левой полости в бак через распределитель 2. При переключении гидравлического распределителя 2 в правую позицию (включением электромагнита Э) первым начнет движение цилиндр 6. Жидкость из его правой полости будет направляться в бак через обратный клапан 7 и распределитель 2. Как только поршень цилиндра 6 остановится на жестком упоре, возросшее давление откроет клапан давления 3, и жидкость начнет поступать в левую полость цилиндра 5. Теперь начнет двигаться и поршень цилиндра 5. Таким образом, цилиндры совершают работу последовательно друг за другом. В отличие от предыдущей схемы (рис.2.124) клапан давления 9 ограничивает максимально допустимое давление в напорной линии насоса 1 и в процессе работы привода закрыт, т.е. он предохраняет гидравлический привод от перегрузок (когда оба поршня стоят на жестком упоре).
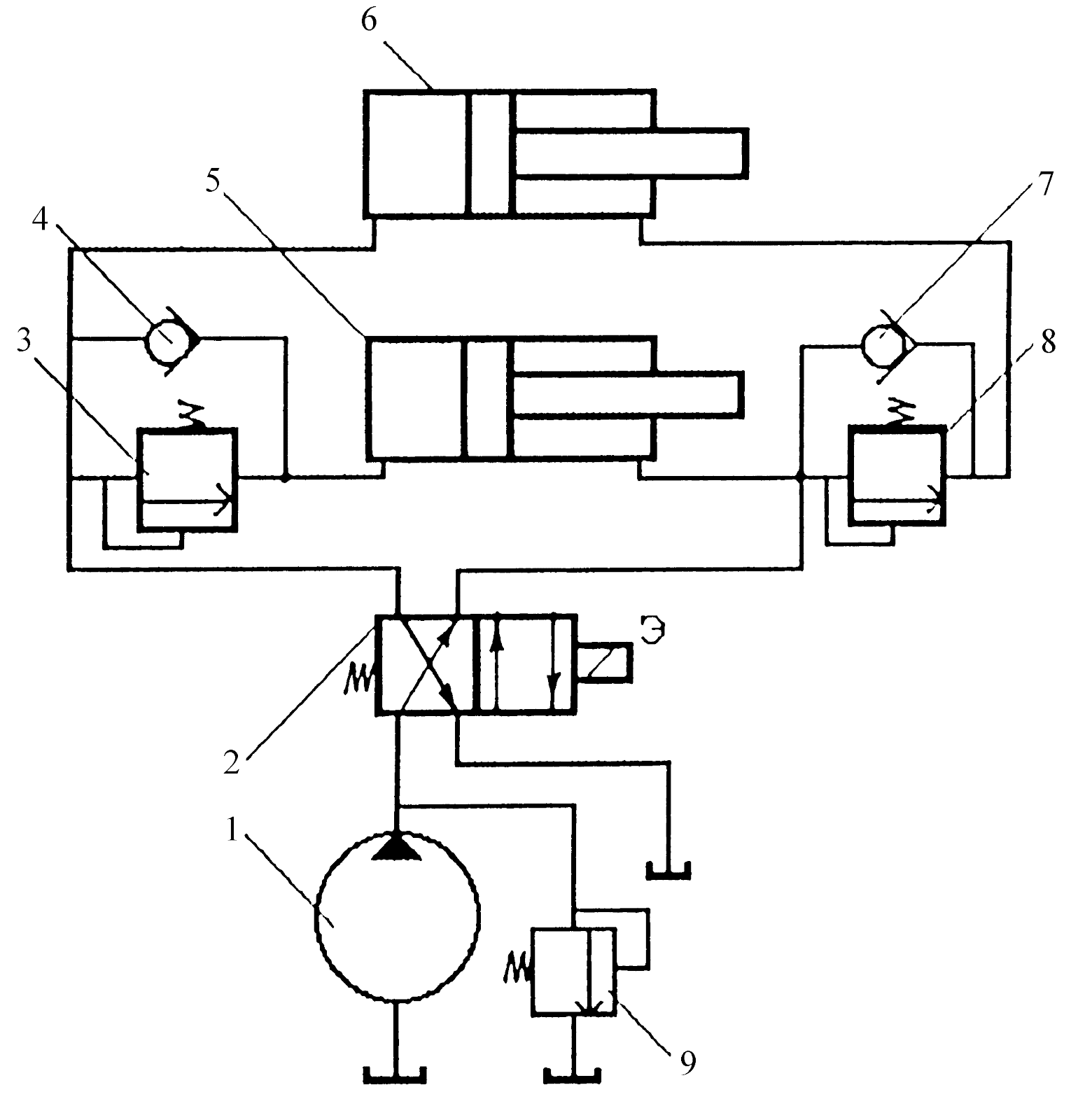
Рис.2.125. Графическое изображение привода последовательного действия
Схема на рис.2.126 представляет возможности раздельного регулирования скорости двигателя при движении в обе стороны. Скорость движения изображенного поршня цилиндра 3 с двусторонним штоком регулируется дросселем 8. В этой схеме поршень цилиндра 3 будет двигаться влево и вправо с одной скоростью v. Остановка поршня возможна в любом месте при переключении распределителя 2 в среднее положение (электромагниты Э1 и Э2 должны быть в этом случае выключены). Поршень же цилиндра 4 с односторонним штоком может двигаться в обе стороны с разными скоростями v1 и v2 благодаря различной настройке дросселей аппаратов 5 и 6 при переключении распределителя 7 электромагнитами Э3 и Э4 из левой позиции в правую и обратно. Причем здесь применен дроссельно-последовательный способ регулирования скорости «на выходе». Недостаток этой схемы заключается в том, что поршень цилиндра 4 совершает движение в обе стороны на всю длину своего хода. Чтобы обеспечить промежуточную остановку поршня следовало бы вместо распределителя 7 типа 4/2 применить трехпозиционный распределитель (аналогичный распределителю 2). Клапан давления 9 расположенный в данной схеме во время работы привода открыт и обеспечивает поддержание постоянного давления в напорном трубопроводе насоса 1. Порядок работы цилиндров 3 и 4 может быть любым и определяется циклограммой этого привода, реализуемой системой управления.
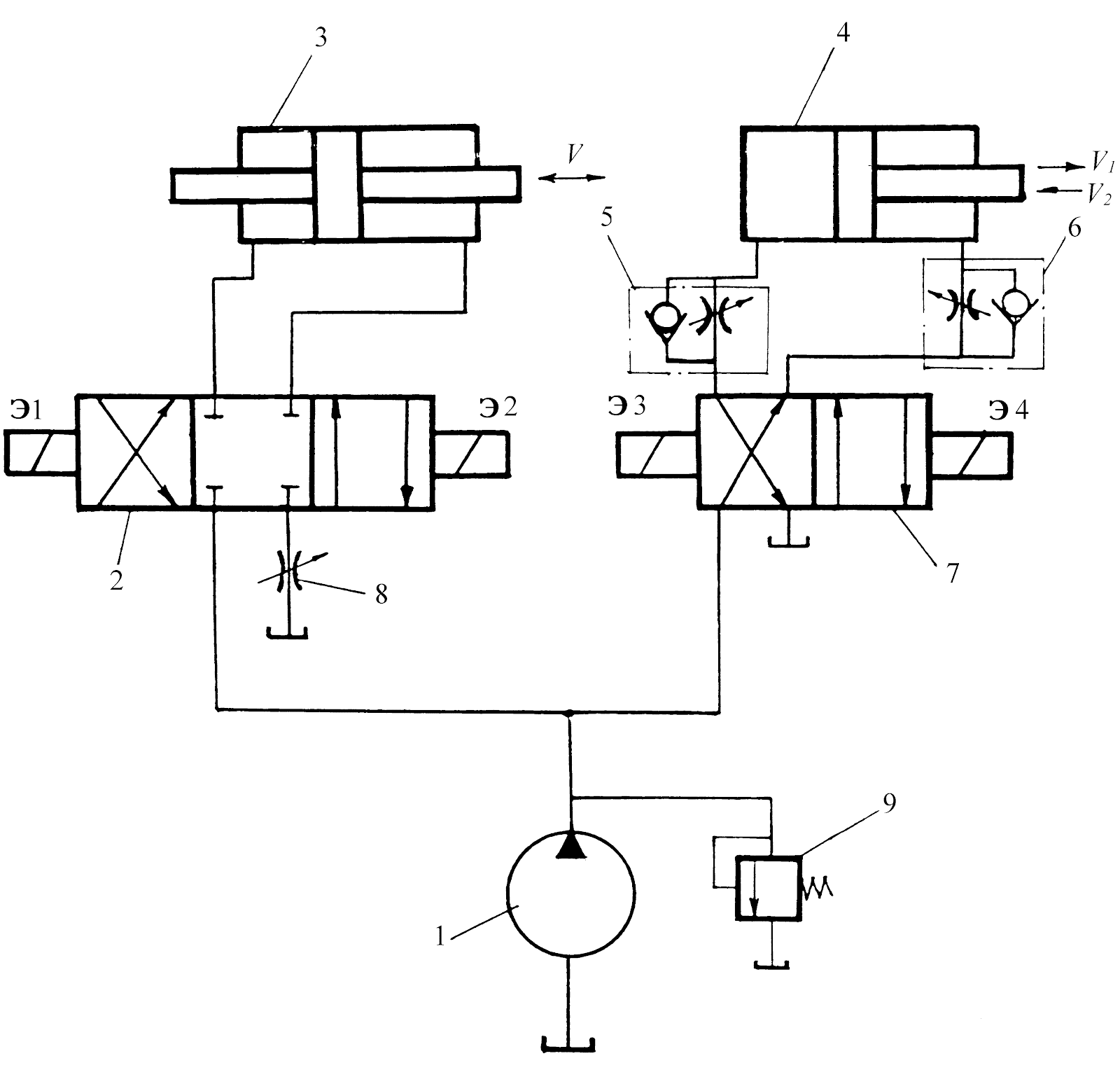
Рис.2.126. Графическое изображение привода с независимым регулированием скорости
Часто в гидравлических приводах технологического оборудования необходимо синхронное движение двух и более двигателей. Под синхронным движением гидравлических двигателей понимают такое движение, при котором изменение условий работы на одном из двигателей вызывает одинаковую реакцию обоих двигателей. Если по каким-либо причинам скорость одного из двигателей уменьшится, то уменьшится и скорость движения другого устройства, и наоборот. Синхронное движение нескольких двигателей может достигаться различными методами, к примеру, применением жестких механических связей, регуляторов расхода, сумматоров и делителей потоков. На рис.2.127 показана схема гидравлического привода, в котором синхронное движение двух цилиндров обеспечивается с помощью делителя потока дроссельного типа модели КД. Работа происходит следующим образом. При подаче жидкости к делителю потока 5 она входит внутрь плавающего плунжера 6, а оттуда через дроссели Др3 и Др1 попадает к цилиндру 1 и через дроссели Др4 и Др2 к цилиндру 3. Их поршни, преодолевая нагрузку F1 и F2, движутся со скоростями v1 = Q1/S1 и v2 = Q2 /S2 . В цилиндрах устанавливаются давления P 1 и P2 , а у торцов плунжера - давления P 3 и P 4. На плунжере устанавливается равенство сил слева и справа, а сам он занимает в корпусе положение, при котором устанавливаются зазоры h 1 и h2. Для этого равновесного положения можно обозначить уравнения выделившихся из потока Qн расходов рабочей жидкости Q1 и Q 2:

где S3 и S4- обозначают площадь проходного сечения дросселей Др3 и Др4 в виде площади сопел плунжера 6, µ- коэффициент расхода дросселей (0,62-0,65), ρ - плотность рабочей жидкости.
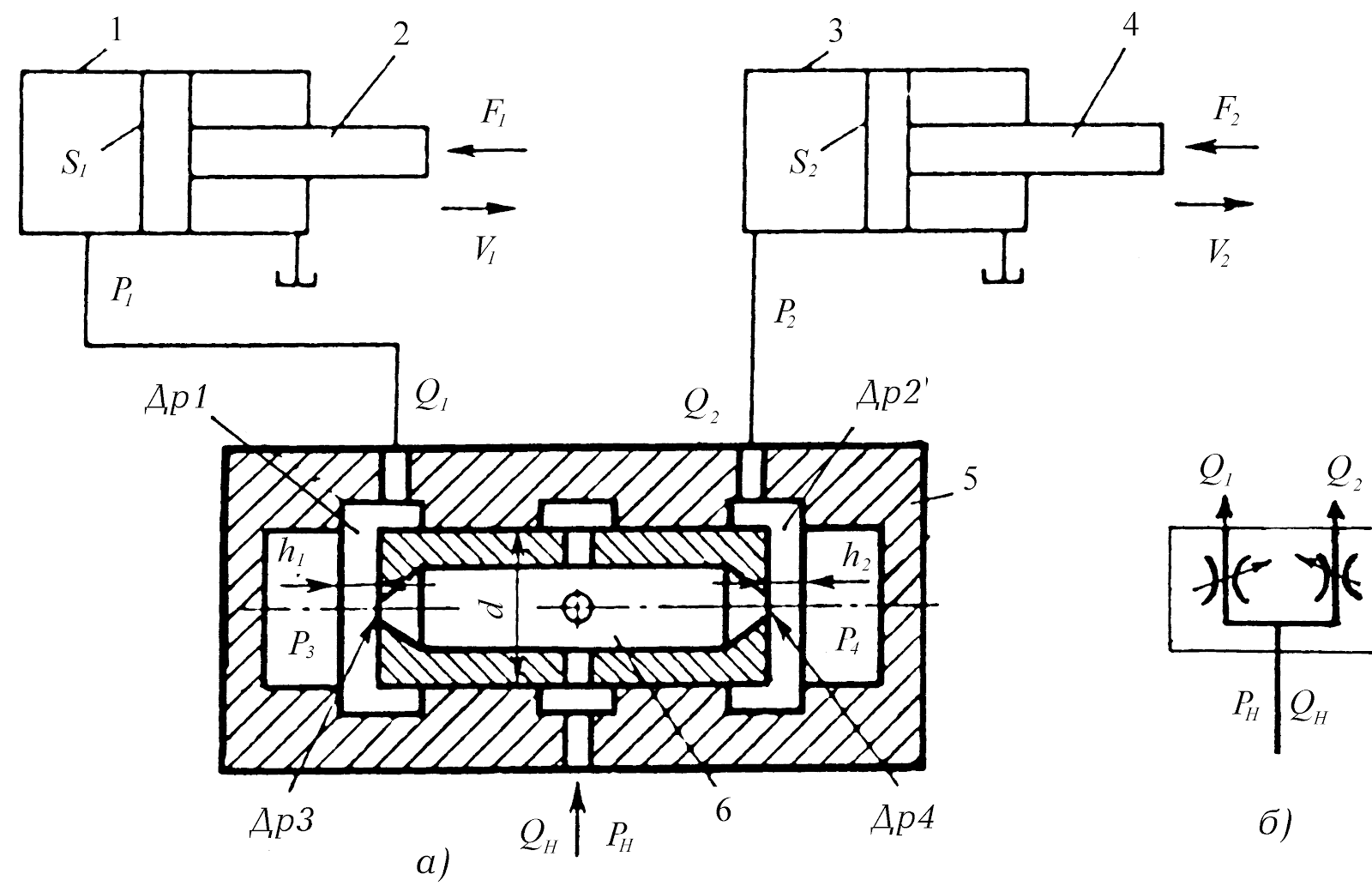
Рис.2.127. Синхронизация движений двух цилиндров с помощью делителя потока дроссельного типа: а – схема работы; б – условное обозначение делителя потока
Рассмотрим, как работает делитель при изменении простых условий на одном из двигателей. К примеру, если сила F1 (символ нагрузки) на цилиндре 1 возросла. Тогда вырастет и давление P 1 (P 1 = F1 /S1). Разность давлений P 3 — P 1 уменьшится, уменьшится и поток Q1. Значит, рост силы F1 вызовет уменьшение и скорости 1 поршня 2 цилиндра 1. Для поддержания синхронного движения необходимо, чтобы уменьшилась и скорость v2 поршня 4 цилиндра 3. Это условие выполняется так. Уменьшение потока Q1 вызовет рост давления P 3 между дросселями Др1 и Др3. Нарушится равновесие сил на плунжере 6, и он начнет смещаться вправо. Вследствие этого уменьшится и зазор h2, что приведет к уменьшению потока Q2 (см. уравнение потоков) и, соответственно, скорости v2 . Таким образом, рост силы F1 привел к уменьшению обеих скоростей v1 и v2, т.е. реакция двух цилиндров на изменившиеся условия работы на одном из них оказалась одинаковой. Когда же закончится переходный процесс? Смещение плунжера 6 вправо вызовет также рост давления P4. Поэтому процесс перемещения плунжера вправо закончится тогда, когда снова наступит равновесие сил на нем. Зазоры h1 и h2 будут иными, давления P 1, P 3 и P4 тоже другими, а потоки Q1 и Q 2 несколько меньшими, чем до изменения нагрузки F1. Если меняется нагрузка на другом двигателе, то срабатывание аппарата аналогично рассмотренному выше.
Анализируя работу делителя потока и уравнения расходов Q 1 и Q 2 , можно установить, что деление потока Qн на два Q1 и Q 2 зависит от подбора дросселей Др3 и Др4. Синхронное движение двух гидравлических двигателей может осуществляться при разных скоростях v1 и v2. А рассмотренный делитель потока пропускает жидкость лишь в одном направлении. Поэтому для реверсивных приводов такой делитель потока, устанавливаемый на входе в двигатели, должен шунтироваться обратными клапанами. Отечественная промышленность выпускает делители потока модели КДК со встроенными обратными клапанами, которые позволяют решить задачу реверса без дополнительных обратных клапанов.
На основе реализации простейших приводов создаются более сложные схемы гидравлических приводов технологического оборудования. Так, на рис.2.128 показана упрощенная возможная гидравлическая схема промышленного робота, обслуживающего какой-либо технологический участок.
Привод содержит пять гидравлических двигателей, приводящих в движение исполнительные органы промышленного робота. Назначение вертикального цилиндра 22 — подъем-опускание консоли промышленного робота с его рукой и схватом, имеющей общую массу m и смонтированную на гильзе цилиндра. Скорость подъема-опускания v1 настраивается дросселем 7. Распределитель 20 типа 4/3 обеспечивает возможность остановки цилиндра в любом положении при выключенных электромагнитах Э2 и Э3 по команде системы управления. Замок 21 одностороннего типа предотвращает самопроизвольное опускание консоли робота при выключенном питании системы.
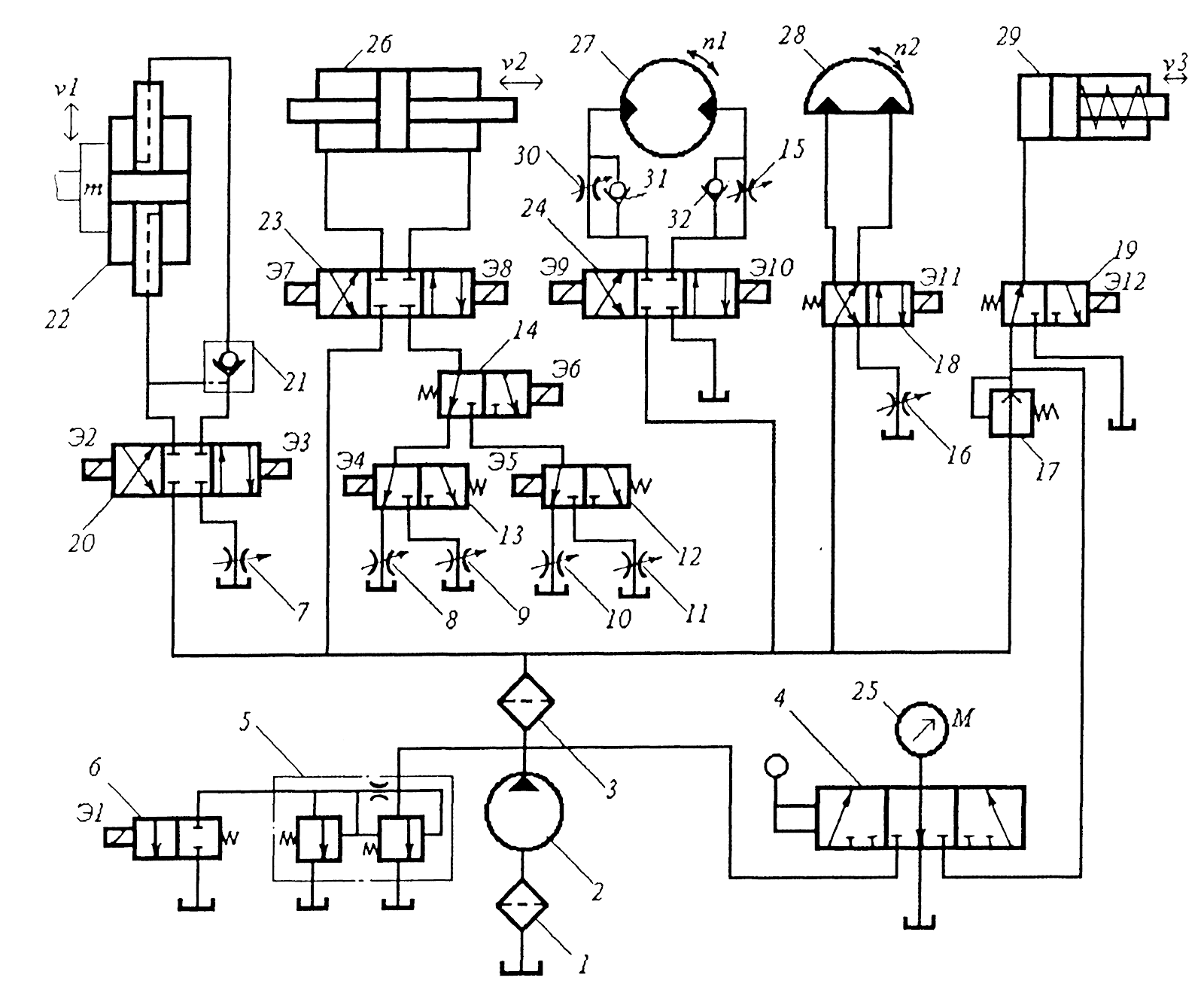
Рис.2.128. Примерная схема гпривода технологического оборудования
Цилиндр 26 обеспечивает выдвижение - втягивание руки робота. Реверс и остановка его поршня осуществляется распределителем 23 по команде, поступающей на электромагниты Э7 и Э8. Дроссель 8, 9, 10 дает возможность заранее настроить привод руки на три разных скорости v2. Эти скорости будут переключаться автоматически по командам системы управления, поступающим на электромагниты Э4, Э5, Э6 распределителей 13,12 и 14 типа 3/2 соответственно. Дроссель 11 является тормозным и подключается к работе в нужные периоды функционирования руки робота.
Мотор 27 является двигателем, обеспечивающим поворот колонны робота с рукой на необходимый по условиям работы угол со скоростью n1, настраиваемый дросселями 30 и 15. Эти дроссели зашунтированы обратными клапанами 31 и 32, позволяющими обеспечить независимое дроссельное регулирование скорости «на выходе». По команде системы управления электромагниты Э9 и Э10 переключают распределитель 4 в нужную позицию. Неполноповоротный мотор 28 поворачивает руку робота со схватом на необходимый по заданию угол. Скорость поворота n2 настраивается дросселем 16, а направление - распределителем 18 типа 4/2 с помощью электромагнита Э11.
Цилиндр 29 одностороннего действия с односторонним штоком является приводом схвата робота, зажимающим деталь. Причем, зажим может быть гидравлическим (выдвижение поршня), а разжим -пружиной цилиндра. Но зажим может осуществляться пружиной, тогда разжим - гидравлический. Команду на зажим-разжим выполняет распределитель 19 с электромагнитом Э12, подавая в цилиндр рабочую жидкость под постоянным пониженным давлением, настраиваемым редукционным клапаном 17. Питание всей системы осуществляется насосом 2. Фильтр грубой очистки 1 и нормальной очистки 3 обеспечивают получение нужного класса чистоты рабочей жидкости. Предохранительный клапан давления непрямого действия обеспечивает поддержание в напорной линии насоса постоянного давления. Контроль настройки необходимого давления питания и давления в цилиндре зажима 29 осуществляется манометром 25, включаемого вручную распределителем 4. С помощью гидрораспределителя 6 с электромагнитом Э1 производится разгрузка насоса в аварийных ситуациях или в наладочном режиме работы системы.
Аналогично гидравлическим приводам на базе регулирующей и направляющей пневмоаппаратуры могут быть созданы и пневматические привода различного назначения. Так, на рис.2.129а показан пневматический привод цилиндра 1 двустороннего действия с односторонним штоком. С помощью пневмораспределителя 13 ручного управления типа 5/2 осуществляется реверс пневмоцилиндра. Дросселем 3 настраивается скорость выдвижения поршня со штоком. Его движение влево (втягивание штока) осуществляется с большой скоростью благодаря работе клапана быстрого выхлопа 2. Сжатый воздух под давлением Р подается в штоковую полость через обратный клапан 4, минуя дроссель 3.
На рис.2.129б представлен пневматический реверсивный привод цилиндра 1, в котором изменение направления движения производится переключением распределителя 5 типа 5/2 путем подачи давления управления Pу1 или Pу2. С помощью дросселей 6 и 7 можно независимо настраивать различные скорости движения при выдвижении или втягивании штока цилиндра 1.
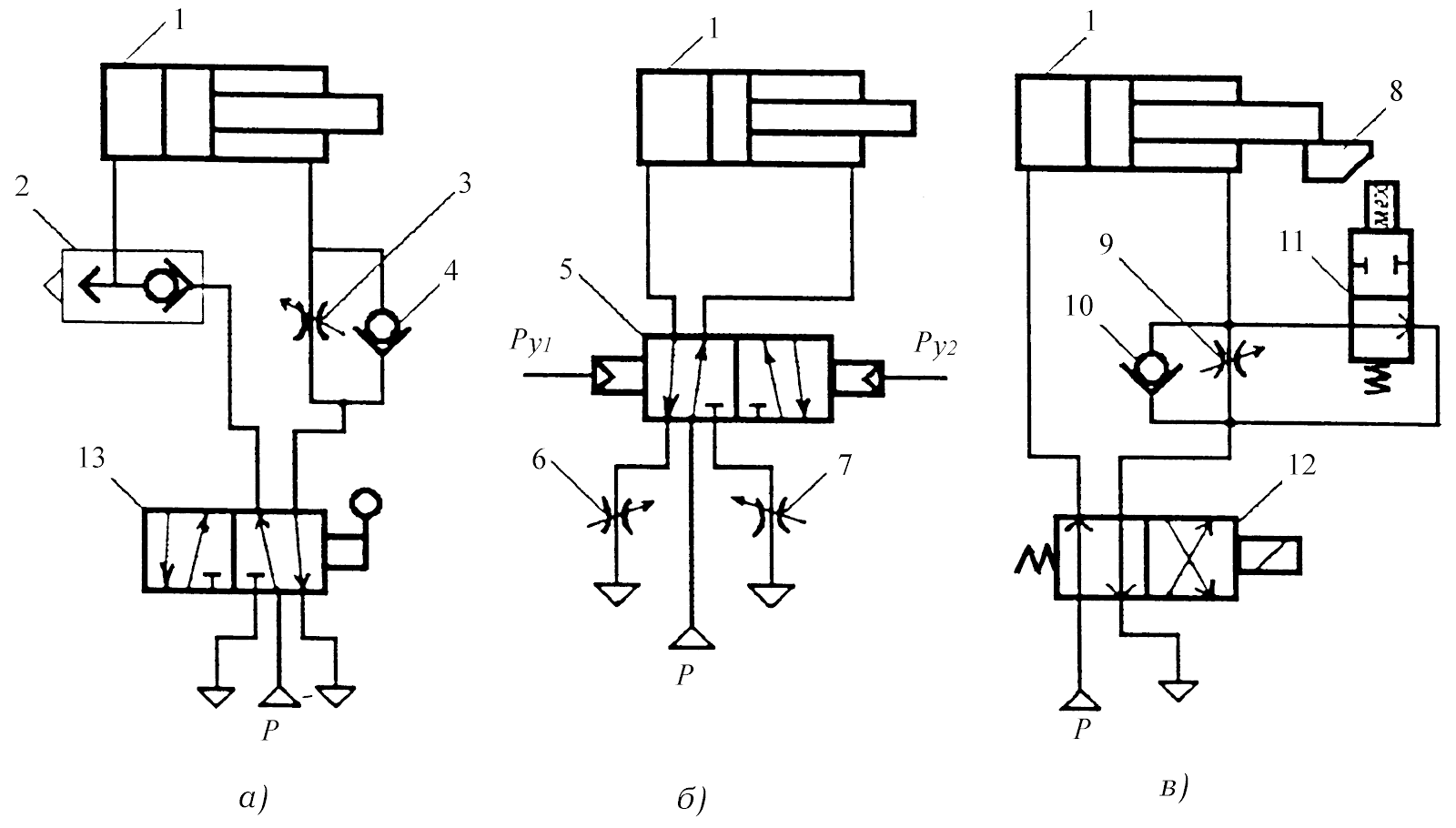
Рис.2.129. Схемы пневматических приводов: а – с клапаном быстрого выхлопа; б – с независимым регулированием скорости; в – с путевым торможением
Схема пневмопривода на рис.2.129в дает возможность тормозить движение при выдвижении штока. Сжатый воздух под давлением Р подается через левую позицию распределителя 12 в бесштоковую полость цилиндра 1. Вместе со штоком движется управляющий кулачок 8, а воздух вытесняется из штоковой полости через нижнюю полость распределителя 11 типа 2/2. В необходимый по циклу работы привода момент кулачок 8 наезжает на управляющий механизм распределителя 11 и переключает его в верхнюю позицию, в которой выход воздуха через распределитель закрывается. Поэтому воздух направляется в дроссель 9, который создает на пути вытесняемого воздуха сопротивление, вследствие чего происходит плавное торможение движущегося поршня. Переключив по команде электрической системы управления распределитель 12 в правую позицию, сжатый воздух подается через обратный клапан 10 в правую полость цилиндра, и происходит реверс двигателя.
На рис.2.130 показаны схемы реверсивных пневматических приводов, в которых приведены примеры применения различных пневмоаппаратов для решения одной и той же задачи изменения направления движения двигателя.
Для осуществления реверса пневмоцилиндра 1 или неполноповоротного пневмомотора (рис.2.130а) достаточно применить распределитель 6 типа 4/2. При включении системы управления электромагнита 1 распределитель занимает левую позицию и изменяет направление движения пневмодвигателей.
Эту же задачу можно решить с помощью пневмораспределителей типа 3/2 с пневматической системой управления (рис.2.130б). При отсутствии команды системы управления в виде давления управления Pу1 распределитель 9 находится в правой позиции, в которой каналы управления пневмораспределителей 7 и 8 связаны с атмосферой. Поэтому под действием пружин распределитель 7 находится в левой позиции, а распределитель 8 - в правой. В этом случае сжатый воздух под давлением питания Ð поступает в левую полость пневмоцилиндра 3 или неполноповоротную пневмотора 4, а из правой полости рабочая среда вытесняется через распределитель 8 в атмосферу. По команде системы управления в виде давления Pу1 распределитель 9 переключается в левую позицию и соединяет полости управления распределителя 7 и 8 с трубопроводом питания Р. Распределитель 7 переключается в правую позицию, соединяя левую полость цилиндра 3 (или пневмомотора 4) с атмосферой. Распределитель 8 переключается в левую позицию и соединяет напорный пневмопровод с правой полостью пневмодвигателя. Поэтому он изменяет направление движения.
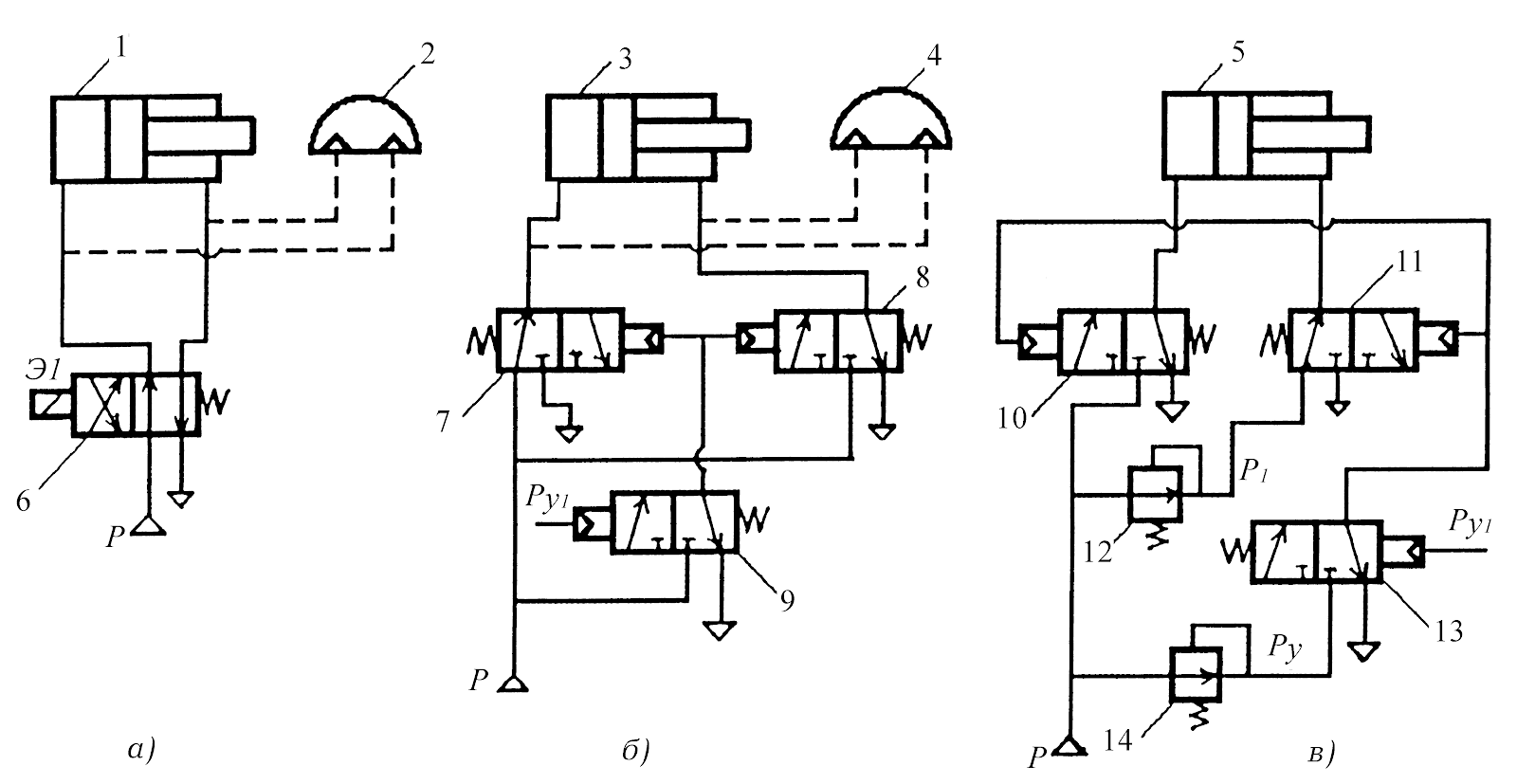
Рис.2.130. Реверсивные пневмоприводы: а - с распределителем типа 4/2 электрической системы управления; б - с распределителями типа 3/2 и пневматической системой управления; в - с редукционными клапанами давления
Аналогично работает и пневмопривод на рис.2.130в, в котором для реверса пневмоцилиндра 5 используются пневмораспределители 10, 11 и 13 типа 3/2 и редукционные пневмоклапаны давления 12 и 14. Отличие состоит в том, что для возврата поршня пневмоцилиндра 5 в левую сторону (втягивание штока) сжатый воздух подается в цилиндр при пониженном давлении P1 по сравнению с давлением питания пневмопривода Р. Снижение давления обеспечивается редукционным клапаном 12 и позволяет экономить расход энергии. Также для управления работой пневмораспределителей по команде Pу1 тоже используется пониженное редукционным клапаном 14 давление Pу , что также обеспечивает экономию энергии.